 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Distributed ADMM Approach to Informative Trajectory Planning for Multi-Target Tracking
Jan 09, 2019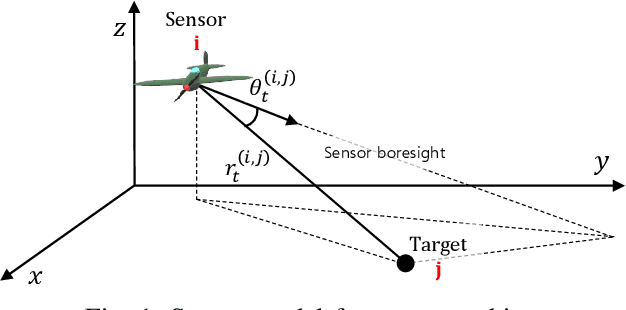
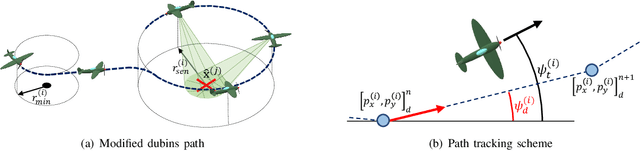
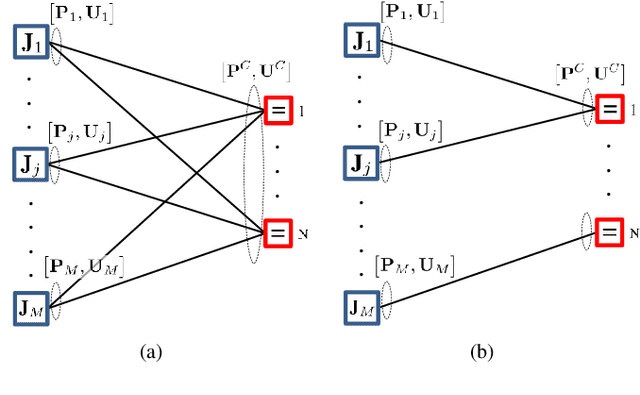
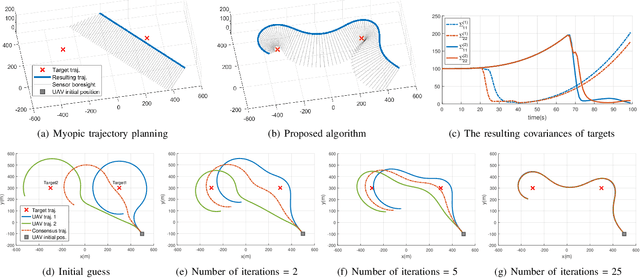
This paper presents a distributed optimization method for informative trajectory planning in multi-target tracking problems. The purpose of such problems is to optimize a sequence of waypoints/control inputs of mobile sensors over a certain future time step to minimize the uncertainty of targets. The planning problem is reformulated as a distributed optimization problem that can be expressed in the form of a subproblem for each target. The subproblems are coupled using the distributed Alternating Direction Method of Multipliers (ADMM). This coupling not only enables the results of each subproblem to be reflected in the optimization process of the other subproblems, but also guides the results of the subproblems to converge to the same solution. In contrast to the existing approaches performing trajectory optimization after assigning tasks, the proposed algorithm does not require the design of a heuristic cost function for task assignment, and it can handle both trajectory optimization and task assignment in multiple target tracking problems simultaneously. In order to reduce the computation time of the algorithm, an edge-cutting method suitable for multiple-target tracking problems is proposed, as is a receding horizon control scheme for real-time implementation, which considers the computation time. Numerical examples are presented to demonstrate the applicability of the algorithm.
Sampling-Based Tour Generation of Arbitrarily Oriented Dubins Sensor Platforms
Aug 09, 2018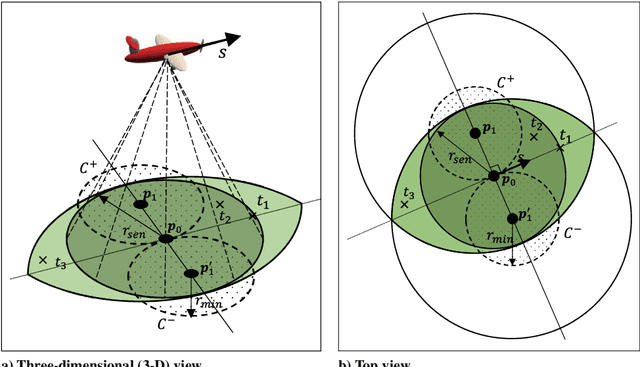
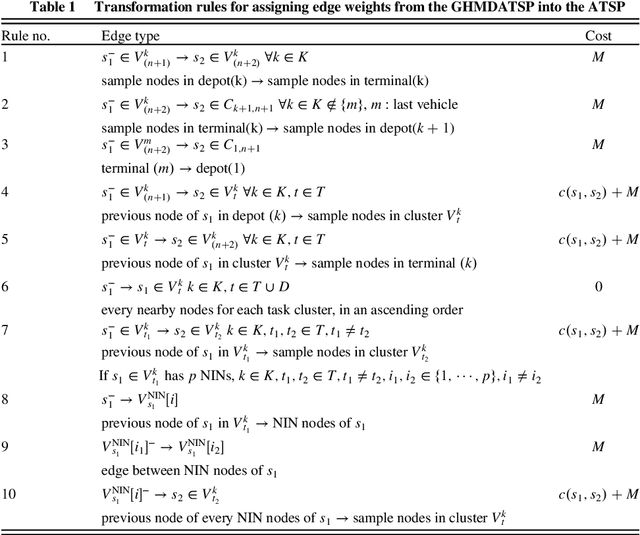
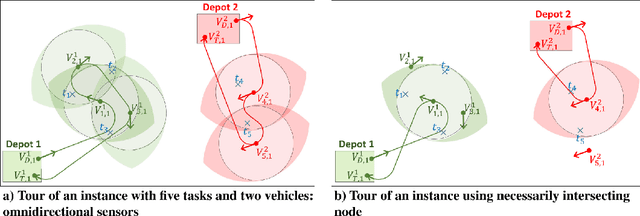
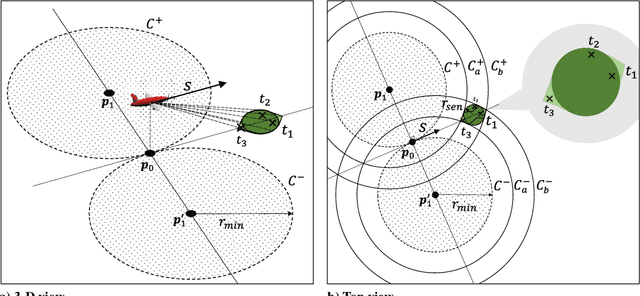
This paper describes a formulation and develops a novel procedure for a fleet of unmanned aerial vehicles (UAVs) from the perspective of remotely executable tasks. In a complex mission environment, the characteristics of vehicles can be different in terms of sensing capability, range, direction, or the motion constraints. The purpose of this paper is to find a set of paths that minimizes the sum of costs while every task region is visited exactly once under certain reasonable assumptions. The heterogeneous multi-UAV path planning problem is formulated as a generalized, heterogeneous, multiple depot traveling salesmen problem (GHMDATSP), which is a variant of the traveling salesman problem. The proposed transformation procedure changes an instance of the GHMDATSP into a format of an Asymmetric, Traveling Salesman Problem (ATSP) to obtain tours for which the total cost of a fleet of vehicles is minimized. The instance of the ATSP is solved using the Lin-Kernighan-Helsgaun heuristic, and the result is inversely transformed to the GHMDATSP-formatted instance to obtain a set of tours. An additional local optimization based path refinement process helps obtain a high-quality solution. Numerical experiments investigate and confirm for the validity and applicability of the proposed procedure.
Informative Path Planning and Mapping with Multiple UAVs in Wind Fields
Oct 05, 2016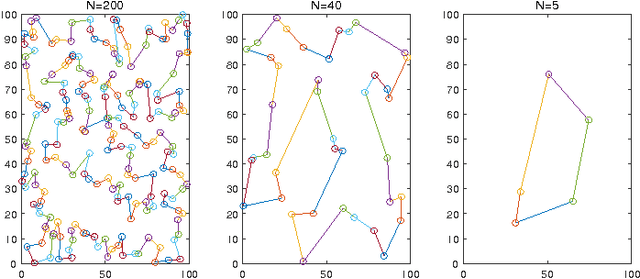
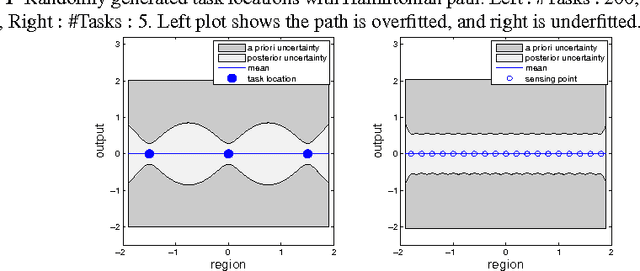
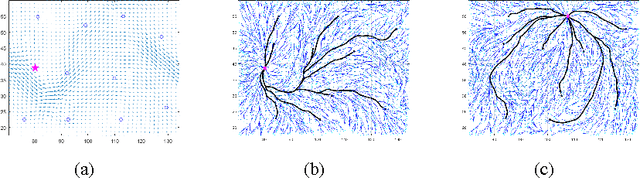
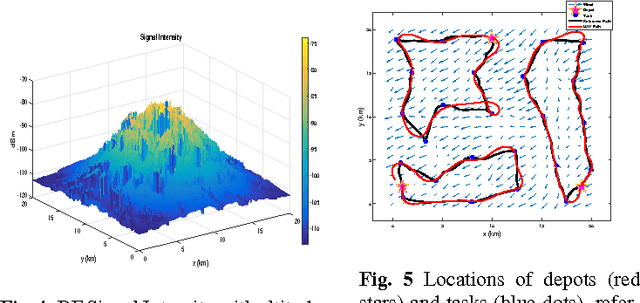
Informative path planning (IPP) is used to design paths for robotic sensor platforms to extract the best/maximum possible information about a quantity of interest while operating under a set of constraints, such as the dynamic feasibility of vehicles. The key challenges of IPP are the strong coupling in multiple layers of decisions: the selection of locations to visit, the allocation of sensor platforms to those locations; and the processing of the gathered information along the paths. This paper presents a systematic procedure for IPP and environmental mapping using multiple UAV sensor platforms. It (a) selects the best locations to observe, (b) calculates the cost and finds the best paths for each UAV, and (c) estimates the measurement value within a given region using the Gaussian process (GP) regression framework. An illustrative example of RF intensity field mapping is presented to demonstrate the validity and applicability of the proposed approach.