 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformative Path Planning and Mapping with Multiple UAVs in Wind Fields
Oct 05, 2016
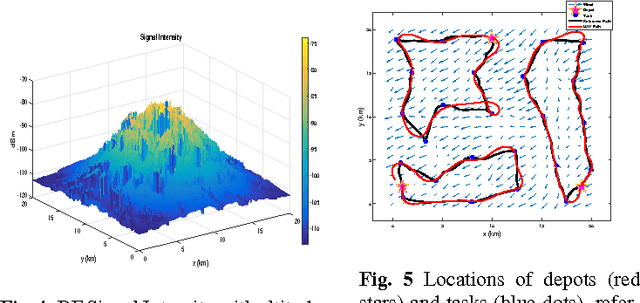
Informative path planning (IPP) is used to design paths for robotic sensor platforms to extract the best/maximum possible information about a quantity of interest while operating under a set of constraints, such as the dynamic feasibility of vehicles. The key challenges of IPP are the strong coupling in multiple layers of decisions: the selection of locations to visit, the allocation of sensor platforms to those locations; and the processing of the gathered information along the paths. This paper presents a systematic procedure for IPP and environmental mapping using multiple UAV sensor platforms. It (a) selects the best locations to observe, (b) calculates the cost and finds the best paths for each UAV, and (c) estimates the measurement value within a given region using the Gaussian process (GP) regression framework. An illustrative example of RF intensity field mapping is presented to demonstrate the validity and applicability of the proposed approach.