 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuralGF: Unsupervised Point Normal Estimation by Learning Neural Gradient Function
Nov 01, 2023Normal estimation for 3D point clouds is a fundamental task in 3D geometry processing. The state-of-the-art methods rely on priors of fitting local surfaces learned from normal supervision. However, normal supervision in benchmarks comes from synthetic shapes and is usually not available from real scans, thereby limiting the learned priors of these methods. In addition, normal orientation consistency across shapes remains difficult to achieve without a separate post-processing procedure. To resolve these issues, we propose a novel method for estimating oriented normals directly from point clouds without using ground truth normals as supervision. We achieve this by introducing a new paradigm for learning neural gradient functions, which encourages the neural network to fit the input point clouds and yield unit-norm gradients at the points. Specifically, we introduce loss functions to facilitate query points to iteratively reach the moving targets and aggregate onto the approximated surface, thereby learning a global surface representation of the data. Meanwhile, we incorporate gradients into the surface approximation to measure the minimum signed deviation of queries, resulting in a consistent gradient field associated with the surface. These techniques lead to our deep unsupervised oriented normal estimator that is robust to noise, outliers and density variations. Our excellent results on widely used benchmarks demonstrate that our method can learn more accurate normals for both unoriented and oriented normal estimation tasks than the latest methods. The source code and pre-trained model are publicly available at https://github.com/LeoQLi/NeuralGF.
Neural Gradient Learning and Optimization for Oriented Point Normal Estimation
Sep 17, 2023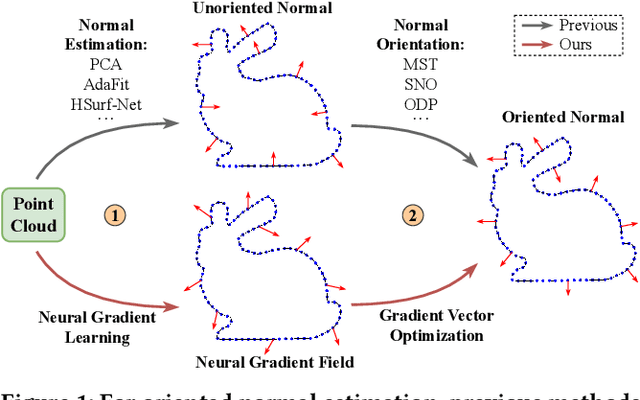
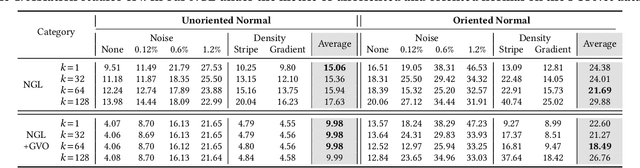
We propose Neural Gradient Learning (NGL), a deep learning approach to learn gradient vectors with consistent orientation from 3D point clouds for normal estimation. It has excellent gradient approximation properties for the underlying geometry of the data. We utilize a simple neural network to parameterize the objective function to produce gradients at points using a global implicit representation. However, the derived gradients usually drift away from the ground-truth oriented normals due to the lack of local detail descriptions. Therefore, we introduce Gradient Vector Optimization (GVO) to learn an angular distance field based on local plane geometry to refine the coarse gradient vectors. Finally, we formulate our method with a two-phase pipeline of coarse estimation followed by refinement. Moreover, we integrate two weighting functions, i.e., anisotropic kernel and inlier score, into the optimization to improve the robust and detail-preserving performance. Our method efficiently conducts global gradient approximation while achieving better accuracy and generalization ability of local feature description. This leads to a state-of-the-art normal estimator that is robust to noise, outliers and point density variations. Extensive evaluations show that our method outperforms previous works in both unoriented and oriented normal estimation on widely used benchmarks. The source code and pre-trained models are available at https://github.com/LeoQLi/NGLO.
SHS-Net: Learning Signed Hyper Surfaces for Oriented Normal Estimation of Point Clouds
May 10, 2023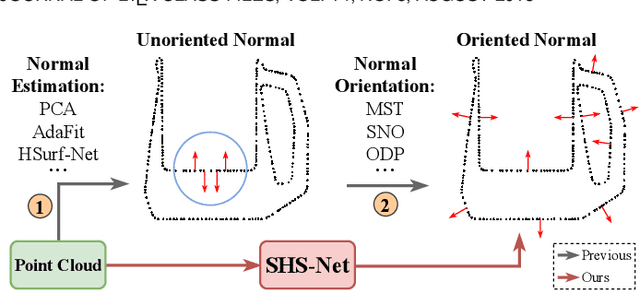
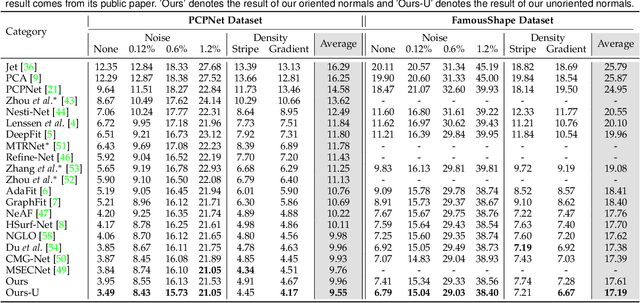
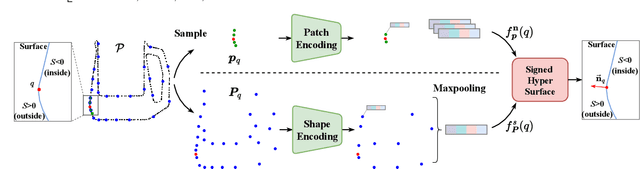
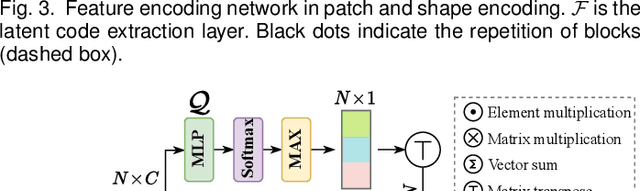
We propose a novel method called SHS-Net for oriented normal estimation of point clouds by learning signed hyper surfaces, which can accurately predict normals with global consistent orientation from various point clouds. Almost all existing methods estimate oriented normals through a two-stage pipeline, i.e., unoriented normal estimation and normal orientation, and each step is implemented by a separate algorithm. However, previous methods are sensitive to parameter settings, resulting in poor results from point clouds with noise, density variations and complex geometries. In this work, we introduce signed hyper surfaces (SHS), which are parameterized by multi-layer perceptron (MLP) layers, to learn to estimate oriented normals from point clouds in an end-to-end manner. The signed hyper surfaces are implicitly learned in a high-dimensional feature space where the local and global information is aggregated. Specifically, we introduce a patch encoding module and a shape encoding module to encode a 3D point cloud into a local latent code and a global latent code, respectively. Then, an attention-weighted normal prediction module is proposed as a decoder, which takes the local and global latent codes as input to predict oriented normals. Experimental results show that our SHS-Net outperforms the state-of-the-art methods in both unoriented and oriented normal estimation on the widely used benchmarks. The code, data and pretrained models are publicly available.