 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAya Model: An Instruction Finetuned Open-Access Multilingual Language Model
Feb 12, 2024
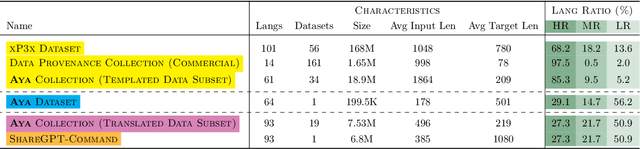
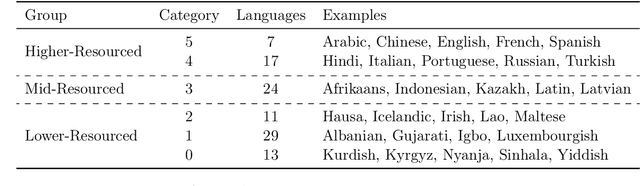

Recent breakthroughs in large language models (LLMs) have centered around a handful of data-rich languages. What does it take to broaden access to breakthroughs beyond first-class citizen languages? Our work introduces Aya, a massively multilingual generative language model that follows instructions in 101 languages of which over 50% are considered as lower-resourced. Aya outperforms mT0 and BLOOMZ on the majority of tasks while covering double the number of languages. We introduce extensive new evaluation suites that broaden the state-of-art for multilingual eval across 99 languages -- including discriminative and generative tasks, human evaluation, and simulated win rates that cover both held-out tasks and in-distribution performance. Furthermore, we conduct detailed investigations on the optimal finetuning mixture composition, data pruning, as well as the toxicity, bias, and safety of our models. We open-source our instruction datasets and our model at https://hf.co/CohereForAI/aya-101
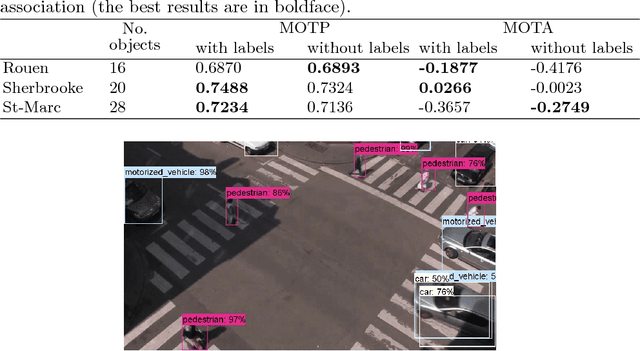
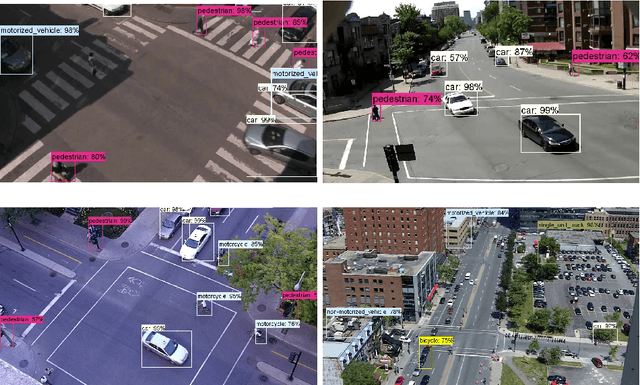
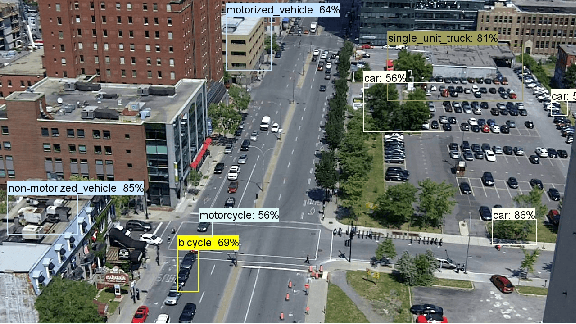
Supervised and Unsupervised Detections for Multiple Object Tracking in Traffic Scenes: A Comparative Study
Mar 30, 2020
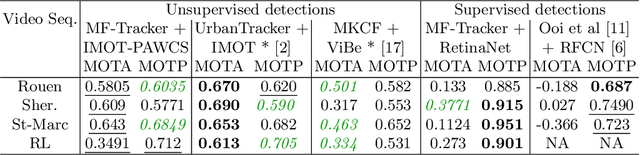
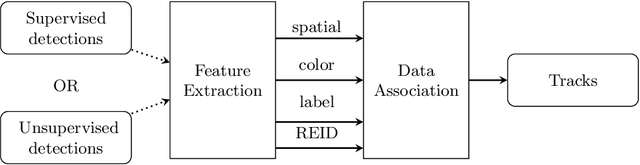
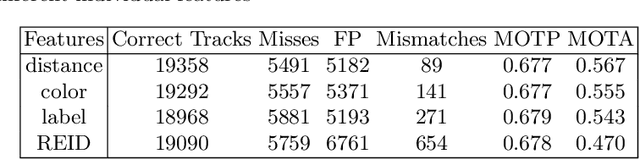
In this paper, we propose a multiple object tracker, called MF-Tracker, that integrates multiple classical features (spatial distances and colours) and modern features (detection labels and re-identification features) in its tracking framework. Since our tracker can work with detections coming either from unsupervised and supervised object detectors, we also investigated the impact of supervised and unsupervised detection inputs in our method and for tracking road users in general. We also compared our results with existing methods that were applied on the UA-Detrac and the UrbanTracker datasets. Results show that our proposed method is performing very well in both datasets with different inputs (MOTA ranging from 0:3491 to 0:5805 for unsupervised inputs on the UrbanTracker dataset and an average MOTA of 0:7638 for supervised inputs on the UA Detrac dataset) under different circumstances. A well-trained supervised object detector can give better results in challenging scenarios. However, in simpler scenarios, if good training data is not available, unsupervised method can perform well and can be a good alternative.
Tracking in Urban Traffic Scenes from Background Subtraction and Object Detection
May 15, 2019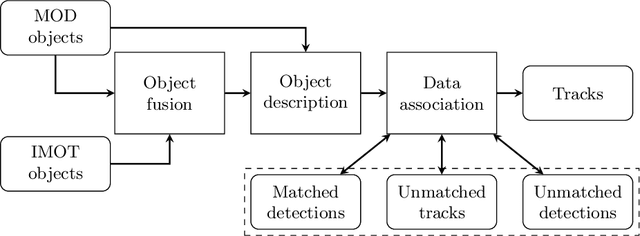
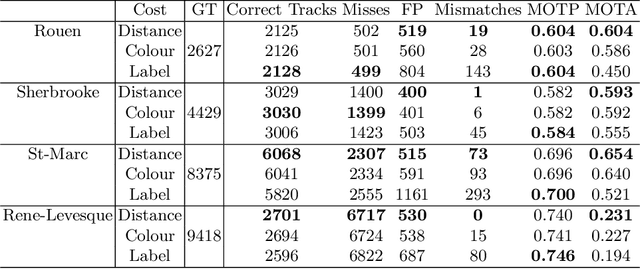

In this paper, we propose to combine detections from background subtraction and from a multiclass object detector for multiple object tracking (MOT) in urban traffic scenes. These objects are associated across frames using spatial, colour and class label information, and trajectory prediction is evaluated to yield the final MOT outputs. The proposed method was tested on the Urban tracker dataset and shows competitive performances compared to state-of-the-art approaches. Results show that the integration of different detection inputs remains a challenging task that greatly affects the MOT performance.
Multiple Object Tracking in Urban Traffic Scenes with a Multiclass Object Detector
Sep 06, 2018
Multiple object tracking (MOT) in urban traffic aims to produce the trajectories of the different road users that move across the field of view with different directions and speeds and that can have varying appearances and sizes. Occlusions and interactions among the different objects are expected and common due to the nature of urban road traffic. In this work, a tracking framework employing classification label information from a deep learning detection approach is used for associating the different objects, in addition to object position and appearances. We want to investigate the performance of a modern multiclass object detector for the MOT task in traffic scenes. Results show that the object labels improve tracking performance, but that the output of object detectors are not always reliable.