Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTracking in Urban Traffic Scenes from Background Subtraction and Object Detection
Paper and Code
May 15, 2019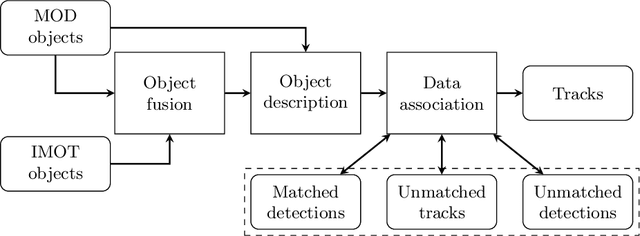
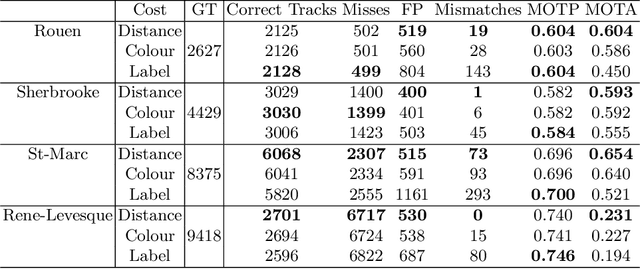
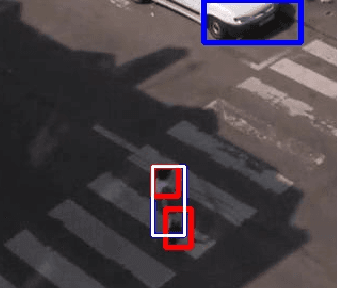

In this paper, we propose to combine detections from background subtraction and from a multiclass object detector for multiple object tracking (MOT) in urban traffic scenes. These objects are associated across frames using spatial, colour and class label information, and trajectory prediction is evaluated to yield the final MOT outputs. The proposed method was tested on the Urban tracker dataset and shows competitive performances compared to state-of-the-art approaches. Results show that the integration of different detection inputs remains a challenging task that greatly affects the MOT performance.
View paper on