 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiple Object Tracking in Urban Traffic Scenes with a Multiclass Object Detector
Paper and Code
Sep 06, 2018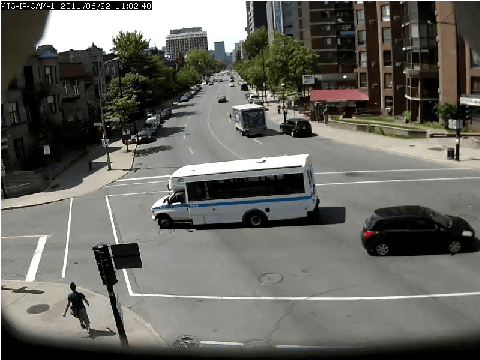
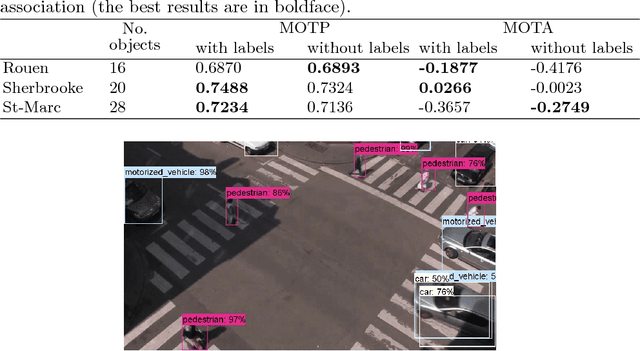
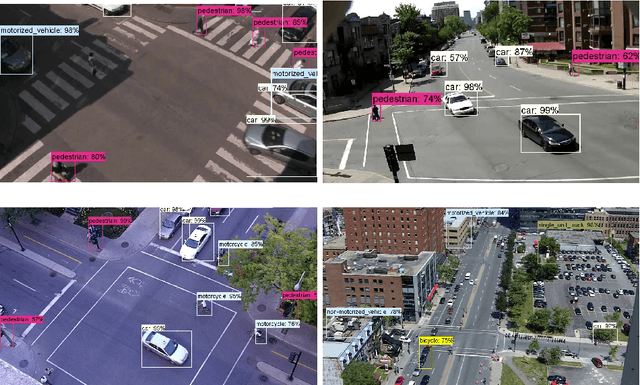
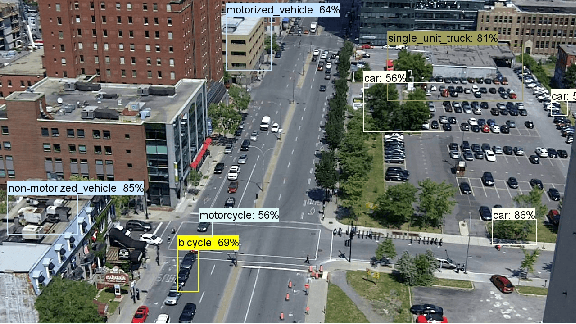
Multiple object tracking (MOT) in urban traffic aims to produce the trajectories of the different road users that move across the field of view with different directions and speeds and that can have varying appearances and sizes. Occlusions and interactions among the different objects are expected and common due to the nature of urban road traffic. In this work, a tracking framework employing classification label information from a deep learning detection approach is used for associating the different objects, in addition to object position and appearances. We want to investigate the performance of a modern multiclass object detector for the MOT task in traffic scenes. Results show that the object labels improve tracking performance, but that the output of object detectors are not always reliable.