 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysInOne: Visual Physics Learning and Reasoning in One Suite
Apr 10, 2026We present PhysInOne, a large-scale synthetic dataset addressing the critical scarcity of physically-grounded training data for AI systems. Unlike existing datasets limited to merely hundreds or thousands of examples, PhysInOne provides 2 million videos across 153,810 dynamic 3D scenes, covering 71 basic physical phenomena in mechanics, optics, fluid dynamics, and magnetism. Distinct from previous works, our scenes feature multiobject interactions against complex backgrounds, with comprehensive ground-truth annotations including 3D geometry, semantics, dynamic motion, physical properties, and text descriptions. We demonstrate PhysInOne's efficacy across four emerging applications: physics-aware video generation, long-/short-term future frame prediction, physical property estimation, and motion transfer. Experiments show that fine-tuning foundation models on PhysInOne significantly enhances physical plausibility, while also exposing critical gaps in modeling complex physical dynamics and estimating intrinsic properties. As the largest dataset of its kind, orders of magnitude beyond prior works, PhysInOne establishes a new benchmark for advancing physics-grounded world models in generation, simulation, and embodied AI.
Automated Action Generation based on Action Field for Robotic Garment Manipulation
May 06, 2025Garment manipulation using robotic systems is a challenging task due to the diverse shapes and deformable nature of fabric. In this paper, we propose a novel method for robotic garment manipulation that significantly improves the accuracy while reducing computational time compared to previous approaches. Our method features an action generator that directly interprets scene images and generates pixel-wise end-effector action vectors using a neural network. The network also predicts a manipulation score map that ranks potential actions, allowing the system to select the most effective action. Extensive simulation experiments demonstrate that our method achieves higher unfolding and alignment performances and faster computation time than previous approaches. Real-world experiments show that the proposed method generalizes well to different garment types and successfully flattens garments.
Learning to Reorient Objects with Stable Placements Afforded by Extrinsic Supports
May 14, 2022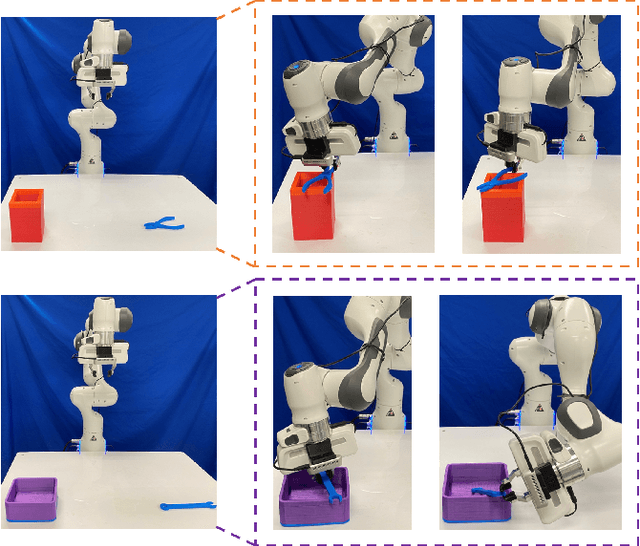
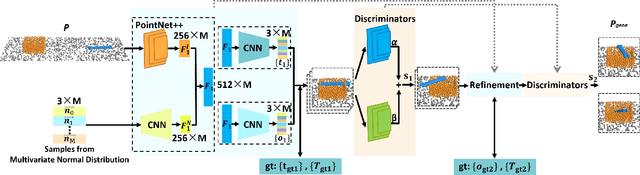
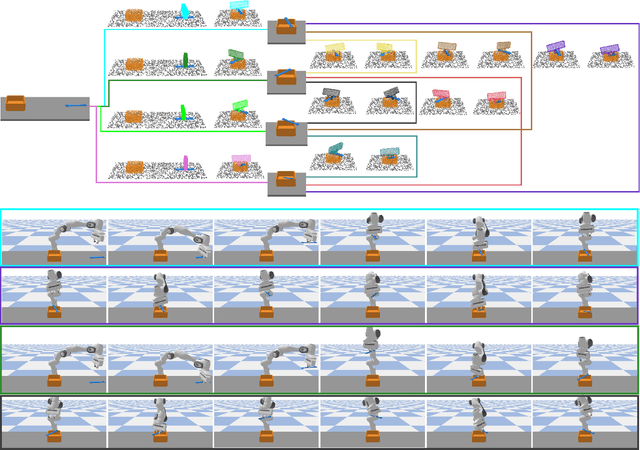
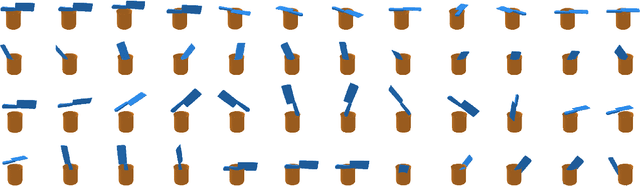
Reorienting objects using extrinsic supporting items on the working platform is a meaningful nonetheless challenging manipulation task, considering the elaborate geometry of objects and the robot's motion planning. In this work, the robot learns to reorient objects through sequential pick-and-place operations according to sensing results from the RGBD camera. We propose generative models to predict objects' stable placements afforded by supporting items from observed point clouds. Then, we build manipulation graphs which enclose shared grasp configurations to connect objects' stable placements for pose transformation. We show in experiments that our method is effective and efficient. Simulation experiments demonstrate that the models can generalize to previously unseen pairs of objects started with random poses on the table. The calculated manipulation graphs are conducive to provide collision-free motions to reorient objects. We employ a robot in the real-world experiments to perform sequential pick-and-place operations, indicating our method is capable of transferring objects' placement poses in real scenes.
Pedestrian Motion Tracking by Using Inertial Sensors on the Smartphone
Sep 18, 2020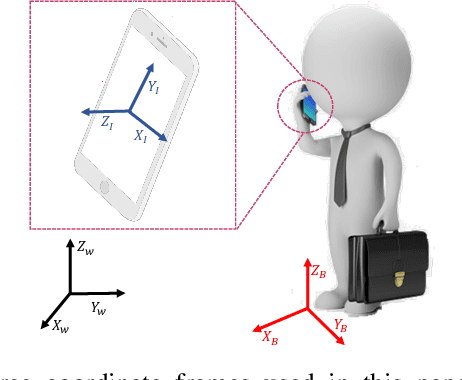
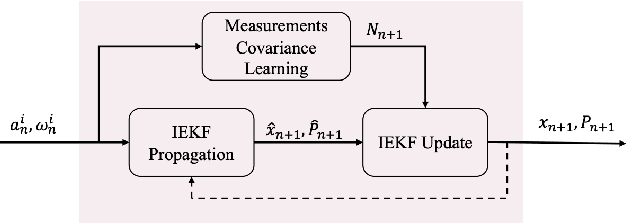
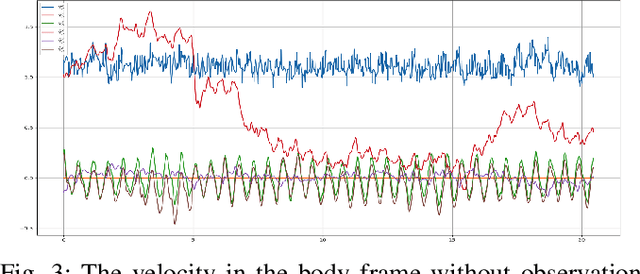
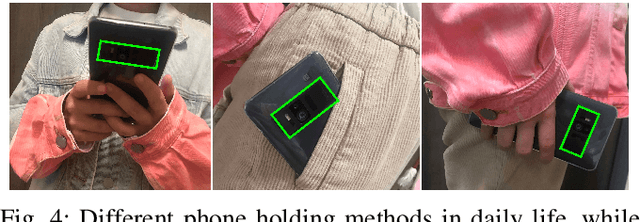
Inertial Measurement Unit (IMU) has long been a dream for stable and reliable motion estimation, especially in indoor environments where GPS strength limits. In this paper, we propose a novel method for position and orientation estimation of a moving object only from a sequence of IMU signals collected from the phone. Our main observation is that human motion is monotonous and periodic. We adopt the Extended Kalman Filter and use the learning-based method to dynamically update the measurement noise of the filter. Our pedestrian motion tracking system intends to accurately estimate planar position, velocity, heading direction without restricting the phone's daily use. The method is not only tested on the self-collected signals, but also provides accurate position and velocity estimations on the public RIDI dataset, i.e., the absolute transmit error is 1.28m for a 59-second sequence.
Fitting IVIM with Variable Projection and Simplicial Optimization
Oct 07, 2019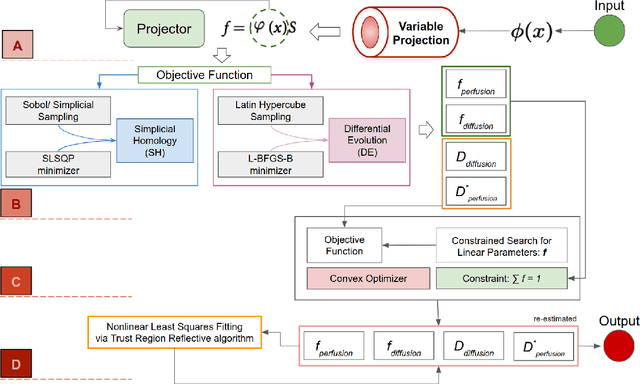
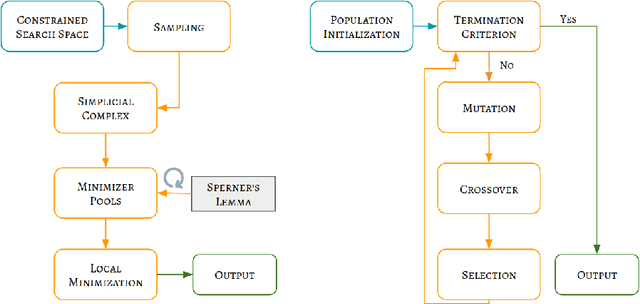
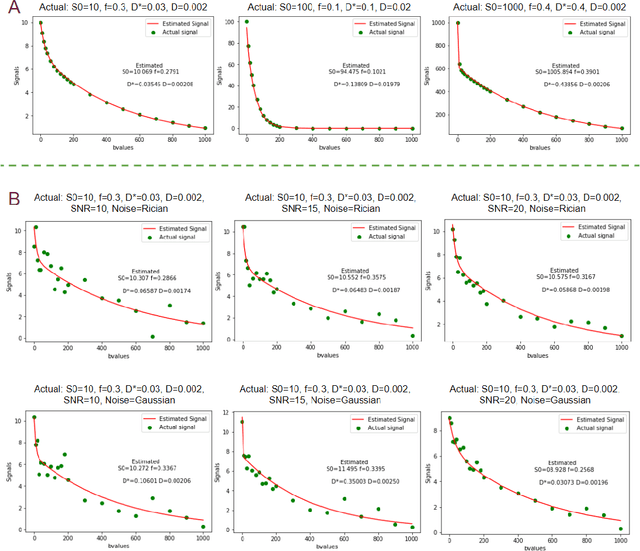
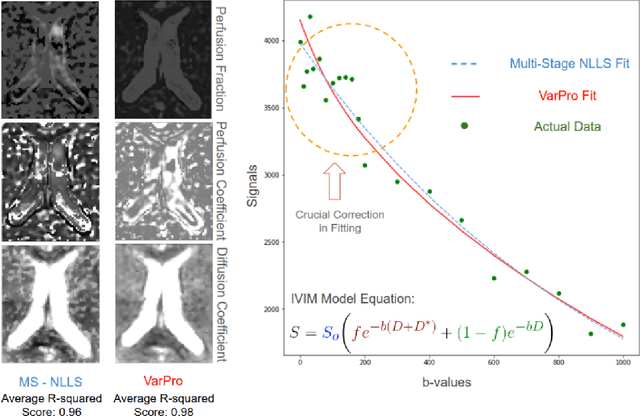
Fitting multi-exponential models to Diffusion MRI (dMRI) data has always been challenging due to various underlying complexities. In this work, we introduce a novel and robust fitting framework for the standard two-compartment IVIM microstructural model. This framework provides a significant improvement over the existing methods and helps estimate the associated diffusion and perfusion parameters of IVIM in an automatic manner. As a part of this work we provide capabilities to switch between more advanced global optimization methods such as simplicial homology (SH) and differential evolution (DE). Our experiments show that the results obtained from this simultaneous fitting procedure disentangle the model parameters in a reduced subspace. The proposed framework extends the seminal work originated in the MIX framework, with improved procedures for multi-stage fitting. This framework has been made available as an open-source Python implementation and disseminated to the community through the DIPY project.