 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Koopman Operator with Control for Nonlinear Systems
Feb 16, 2022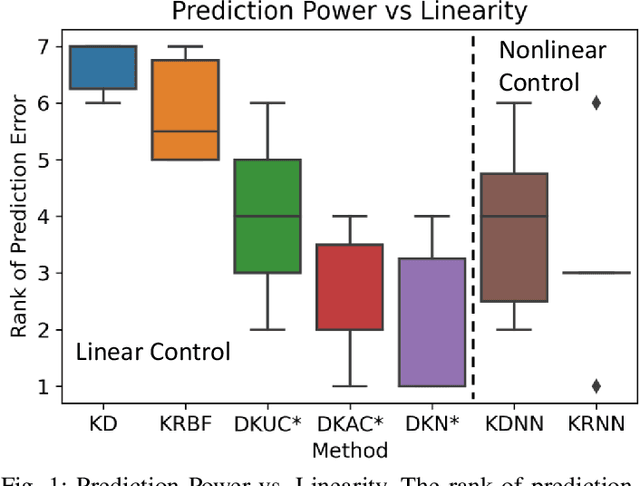
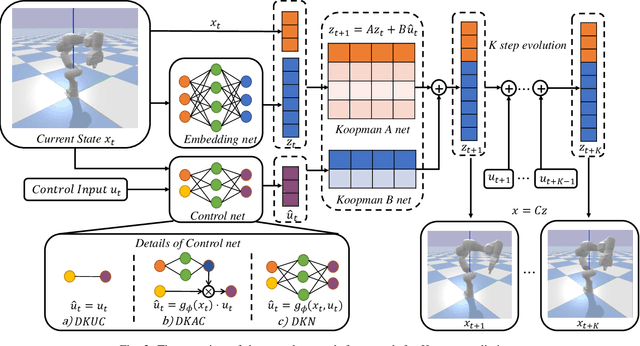
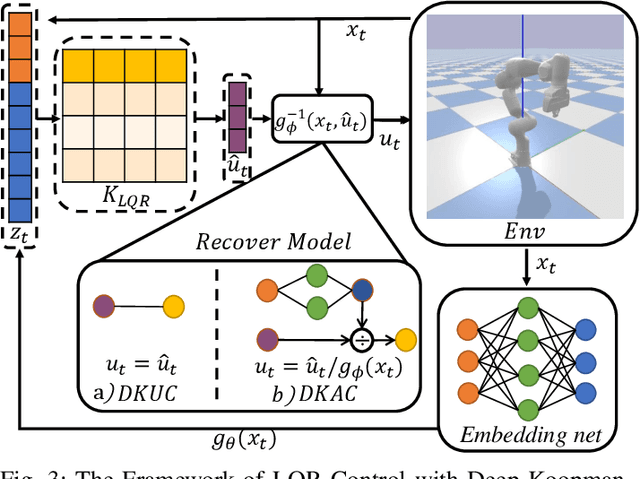
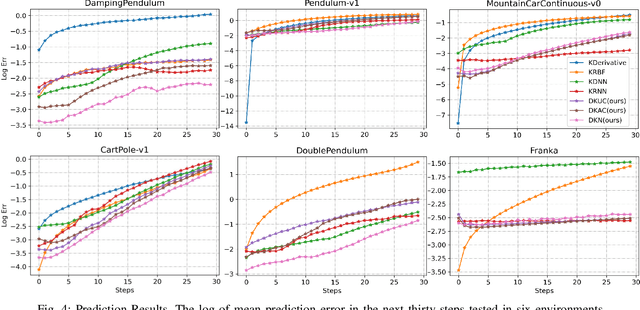
Recently Koopman operator has become a promising data-driven tool to facilitate real-time control for unknown nonlinear systems. It maps nonlinear systems into equivalent linear systems in embedding space, ready for real-time linear control methods. However, designing an appropriate Koopman embedding function remains a challenging task. Furthermore, most Koopman-based algorithms only consider nonlinear systems with linear control input, resulting in lousy prediction and control performance when the system is fully nonlinear with the control input. In this work, we propose an end-to-end deep learning framework to learn the Koopman embedding function and Koopman Operator together to alleviate such difficulties. We first parameterize the embedding function and Koopman Operator with the neural network and train them end-to-end with the K-steps loss function. We then design an auxiliary control network to encode the nonlinear state-dependent control term to model the nonlinearity in control input. For linear control, this encoded term is considered the new control variable instead, ensuring the linearity of the embedding space. Then we deploy Linear Quadratic Regulator (LQR) on the linear embedding space to derive the optimal control policy and decode the actual control input from the control net. Experimental results demonstrate that our approach outperforms other existing methods, reducing the prediction error by order-of-magnitude and achieving superior control performance in several nonlinear dynamic systems like damping pendulum, CartPole, and 7 Dof robotic manipulator.
Pedestrian Motion Tracking by Using Inertial Sensors on the Smartphone
Sep 18, 2020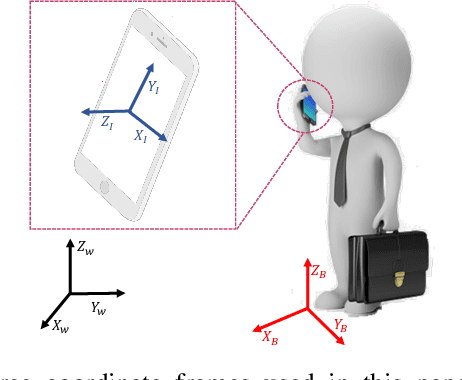
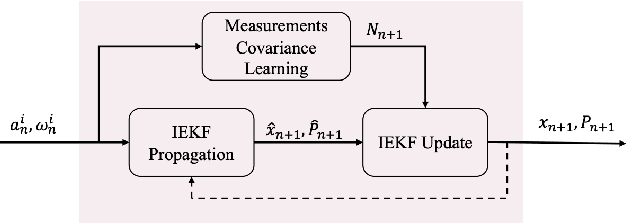
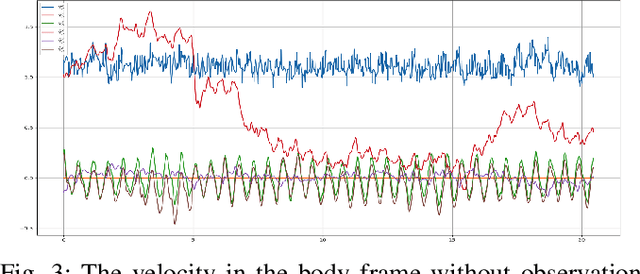
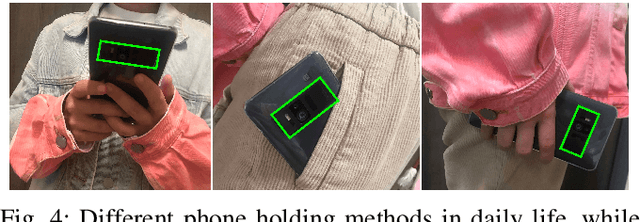
Inertial Measurement Unit (IMU) has long been a dream for stable and reliable motion estimation, especially in indoor environments where GPS strength limits. In this paper, we propose a novel method for position and orientation estimation of a moving object only from a sequence of IMU signals collected from the phone. Our main observation is that human motion is monotonous and periodic. We adopt the Extended Kalman Filter and use the learning-based method to dynamically update the measurement noise of the filter. Our pedestrian motion tracking system intends to accurately estimate planar position, velocity, heading direction without restricting the phone's daily use. The method is not only tested on the self-collected signals, but also provides accurate position and velocity estimations on the public RIDI dataset, i.e., the absolute transmit error is 1.28m for a 59-second sequence.