 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Metrics and Losses for Object Detection in Autonomous Driving
Sep 21, 2022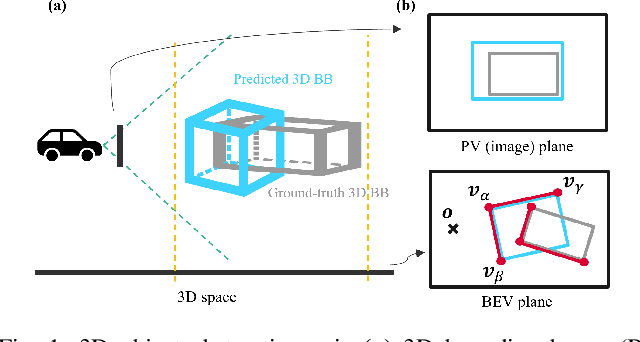
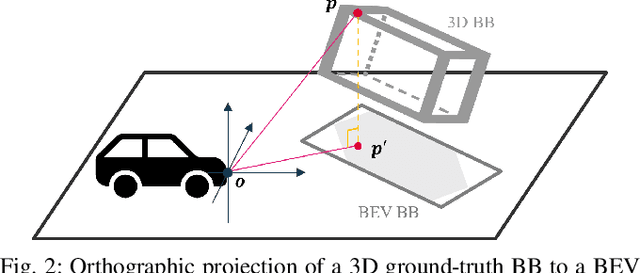
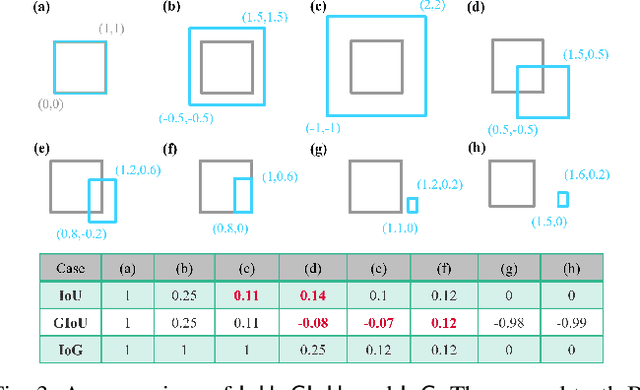
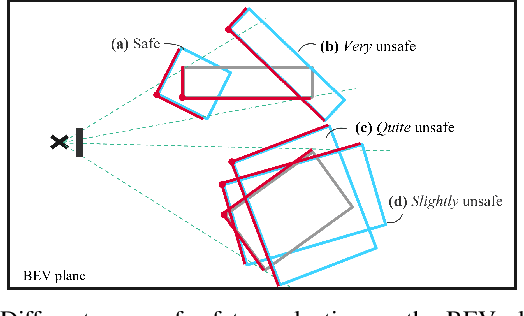
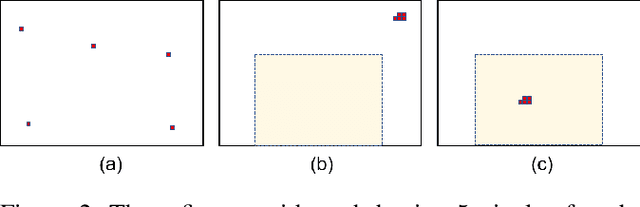
State-of-the-art object detectors have been shown effective in many applications. Usually, their performance is evaluated based on accuracy metrics such as mean Average Precision. In this paper, we consider a safety property of 3D object detectors in the context of Autonomous Driving (AD). In particular, we propose an essential safety requirement for object detectors in AD and formulate it into a specification. During the formulation, we find that abstracting 3D objects with projected 2D bounding boxes on the image and bird's-eye-view planes allows for a necessary and sufficient condition to the proposed safety requirement. We then leverage the analysis and derive qualitative and quantitative safety metrics based on the Intersection-over-Ground-Truth measure and a distance ratio between predictions and ground truths. Finally, for continual improvement, we formulate safety losses that can be used to optimize object detectors towards higher safety scores. Our experiments with public models on the MMDetection3D library and the nuScenes datasets demonstrate the validity of our consideration and proposals.
Robustness Verification for Attention Networks using Mixed Integer Programming
Feb 08, 2022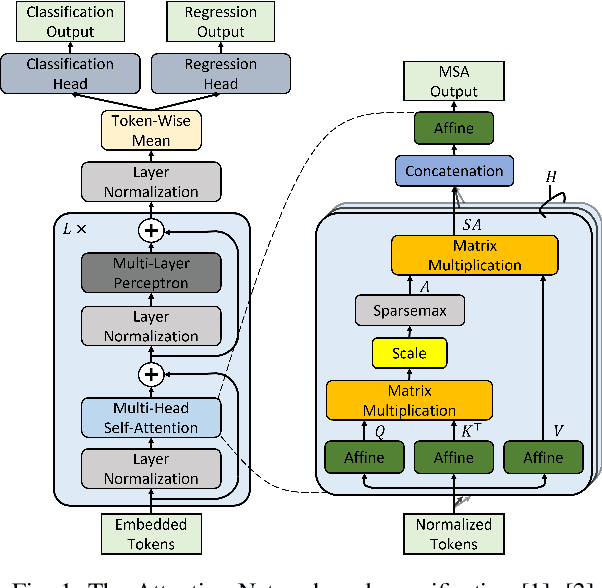

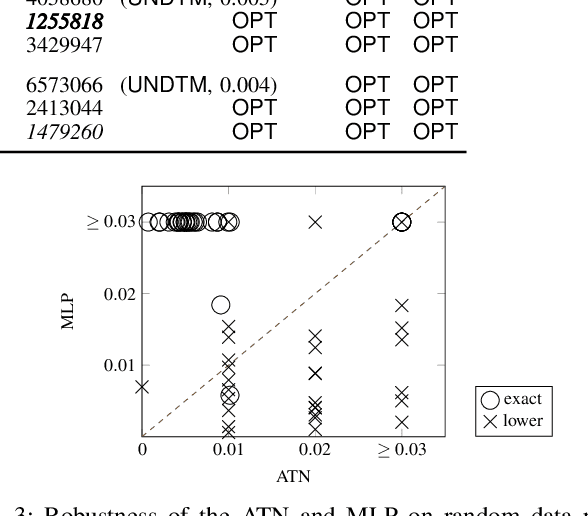
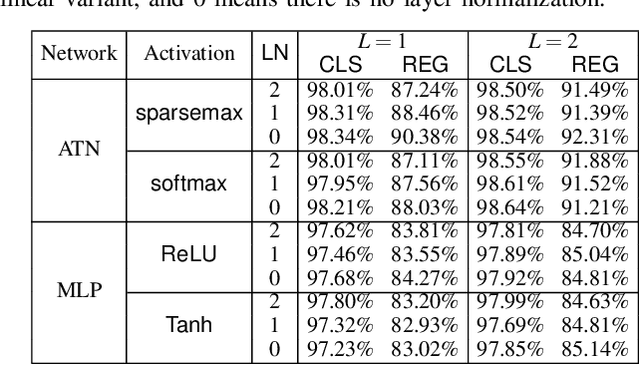
Attention networks such as transformers have been shown powerful in many applications ranging from natural language processing to object recognition. This paper further considers their robustness properties from both theoretical and empirical perspectives. Theoretically, we formulate a variant of attention networks containing linearized layer normalization and sparsemax activation, and reduce its robustness verification to a Mixed Integer Programming problem. Apart from a na\"ive encoding, we derive tight intervals from admissible perturbation regions and examine several heuristics to speed up the verification process. More specifically, we find a novel bounding technique for sparsemax activation, which is also applicable to softmax activation in general neural networks. Empirically, we evaluate our proposed techniques with a case study on lane departure warning and demonstrate a performance gain of approximately an order of magnitude. Furthermore, although attention networks typically deliver higher accuracy than general neural networks, contrasting its robustness against a similar-sized multi-layer perceptron surprisingly shows that they are not necessarily more robust.
Safety Metrics for Semantic Segmentation in Autonomous Driving
May 21, 2021
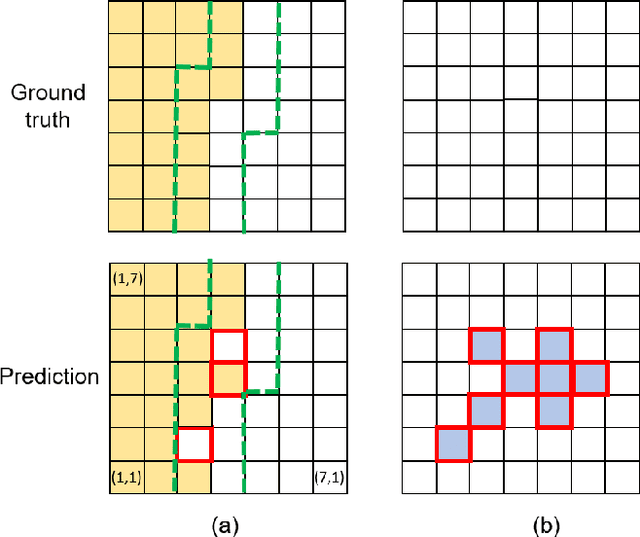

Within the context of autonomous driving, safety-related metrics for deep neural networks have been widely studied for image classification and object detection. In this paper, we further consider safety-aware correctness and robustness metrics specialized for semantic segmentation. The novelty of our proposal is to move beyond pixel-level metrics: Given two images with each having N pixels being class-flipped, the designed metrics should, depending on the clustering of pixels being class-flipped or the location of occurrence, reflect a different level of safety criticality. The result evaluated on an autonomous driving dataset demonstrates the validity and practicality of our proposed methodology.