 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Metrics and Losses for Object Detection in Autonomous Driving
Paper and Code
Sep 21, 2022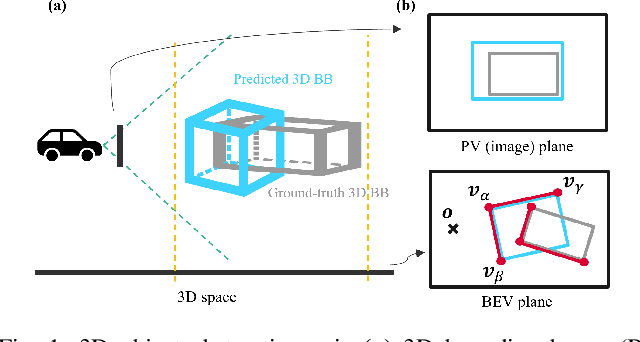
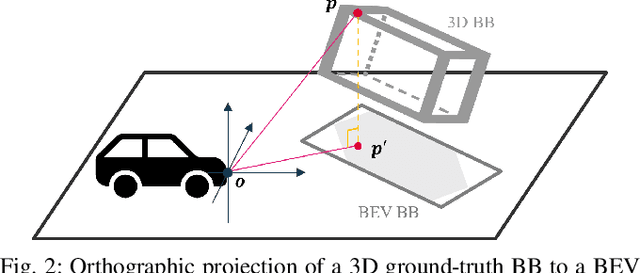
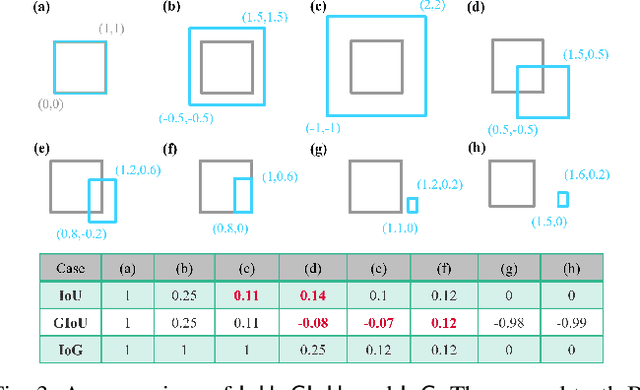
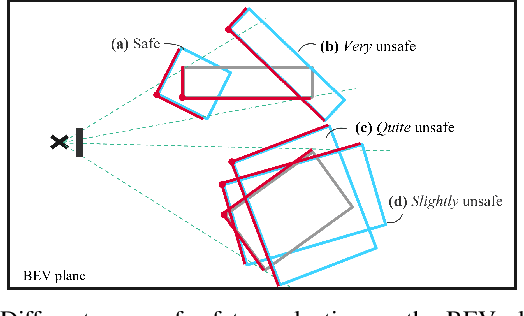
State-of-the-art object detectors have been shown effective in many applications. Usually, their performance is evaluated based on accuracy metrics such as mean Average Precision. In this paper, we consider a safety property of 3D object detectors in the context of Autonomous Driving (AD). In particular, we propose an essential safety requirement for object detectors in AD and formulate it into a specification. During the formulation, we find that abstracting 3D objects with projected 2D bounding boxes on the image and bird's-eye-view planes allows for a necessary and sufficient condition to the proposed safety requirement. We then leverage the analysis and derive qualitative and quantitative safety metrics based on the Intersection-over-Ground-Truth measure and a distance ratio between predictions and ground truths. Finally, for continual improvement, we formulate safety losses that can be used to optimize object detectors towards higher safety scores. Our experiments with public models on the MMDetection3D library and the nuScenes datasets demonstrate the validity of our consideration and proposals.