 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Layered Architecture for Active Perception: Image Classification using Deep Reinforcement Learning
Sep 20, 2019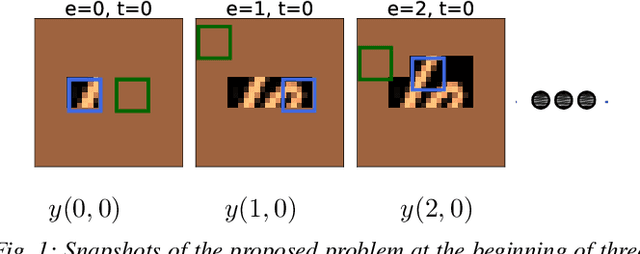
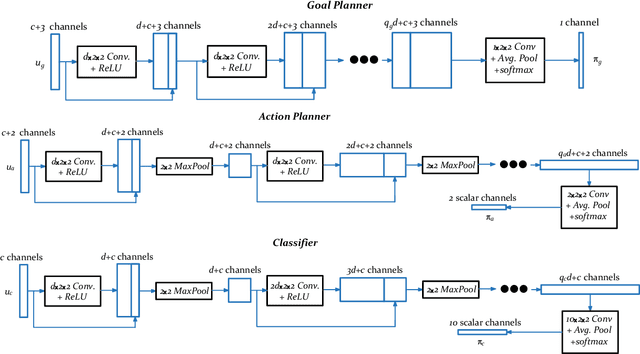
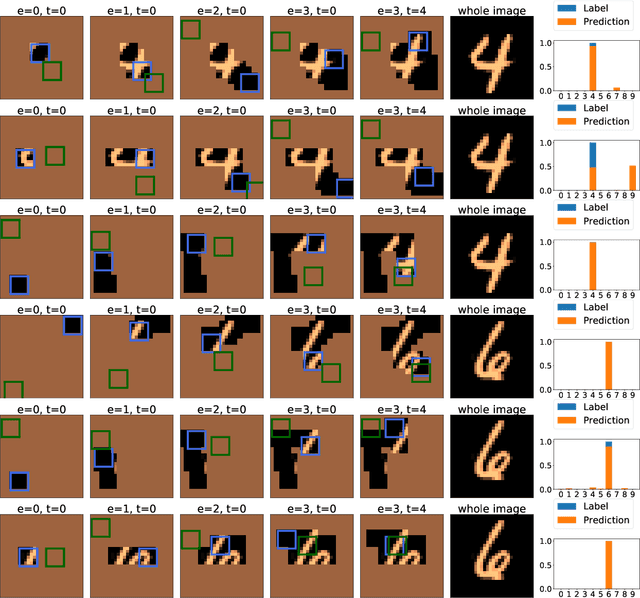
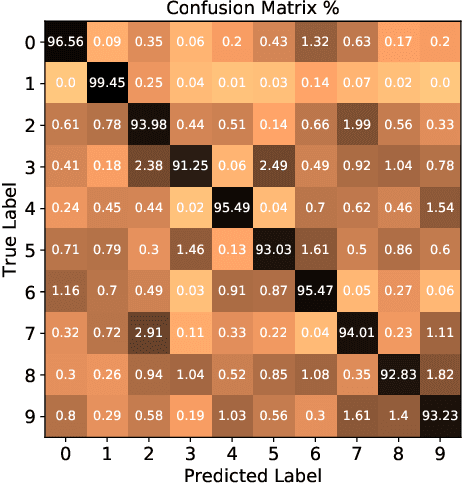
We propose a planning and perception mechanism for a robot (agent), that can only observe the underlying environment partially, in order to solve an image classification problem. A three-layer architecture is suggested that consists of a meta-layer that decides the intermediate goals, an action-layer that selects local actions as the agent navigates towards a goal, and a classification-layer that evaluates the reward and makes a prediction. We design and implement these layers using deep reinforcement learning. A generalized policy gradient algorithm is utilized to learn the parameters of these layers to maximize the expected reward. Our proposed methodology is tested on the MNIST dataset of handwritten digits, which provides us with a level of explainability while interpreting the agent's intermediate goals and course of action.
Multi-Agent Image Classification via Reinforcement Learning
May 13, 2019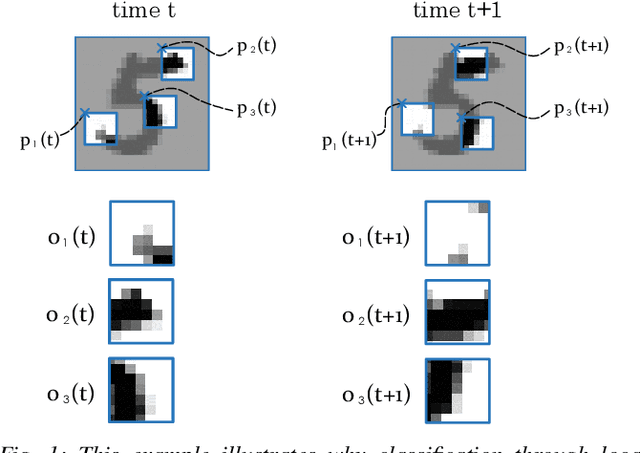
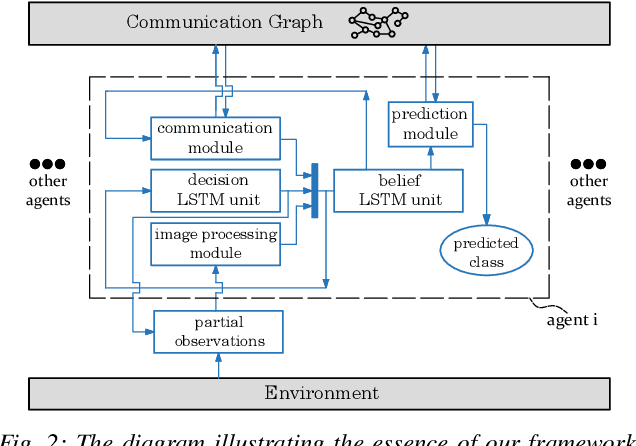
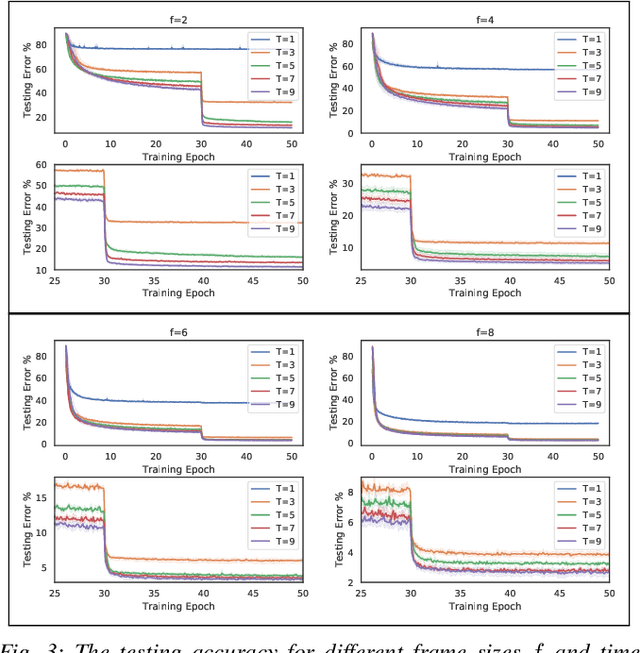
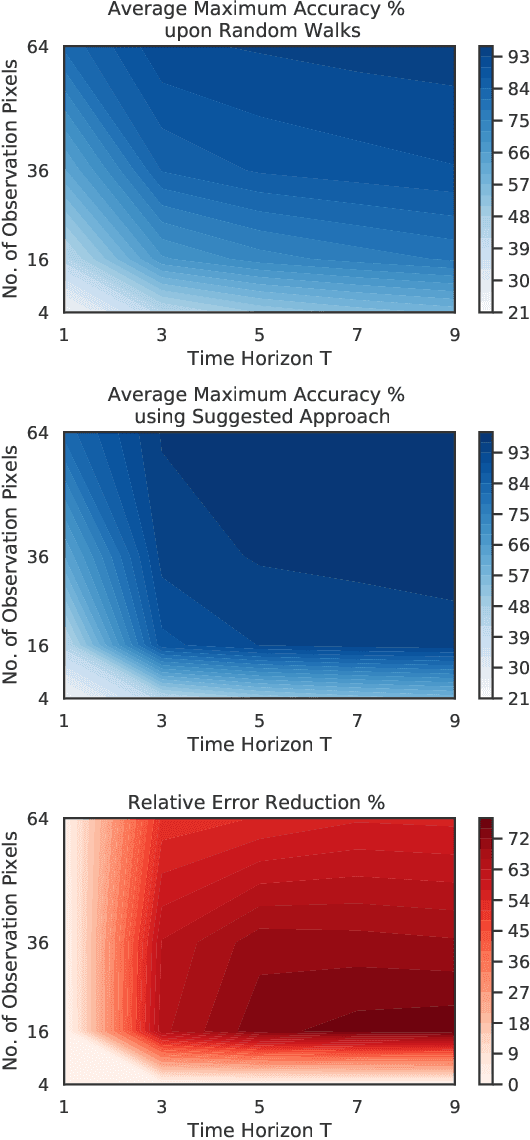
We investigate a classification problem using multiple mobile agents that are capable of collecting (partial) pose-dependent observations of an unknown environment. The objective is to classify an image (e.g, map of a large area) over a finite time horizon. We propose a network architecture on how agents should form a local belief, take local actions, extract relevant features and specification from their raw partial observations. Agents are allowed to exchange information with their neighboring agents and run a decentralized consensus protocol to update their own beliefs. It is shown how reinforcement learning techniques can be utilized to achieve decentralized implementation of the classification problem. Our experimental results on MNIST handwritten digit dataset demonstrates the effectiveness of our proposed framework.
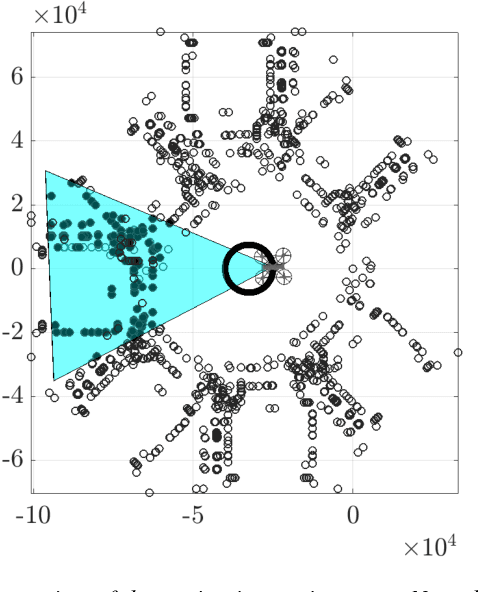
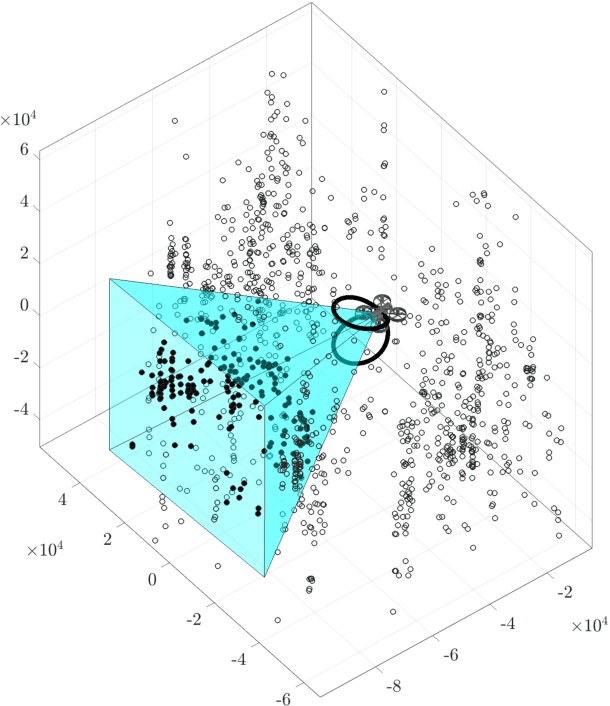
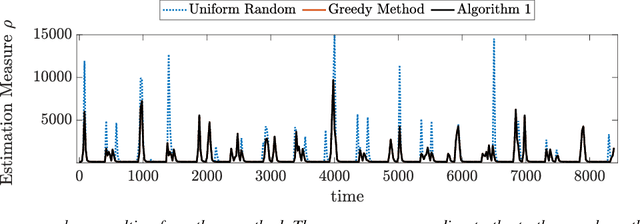
Estimation with Fast Landmark Selection in Robot Visual Navigation
Feb 04, 2019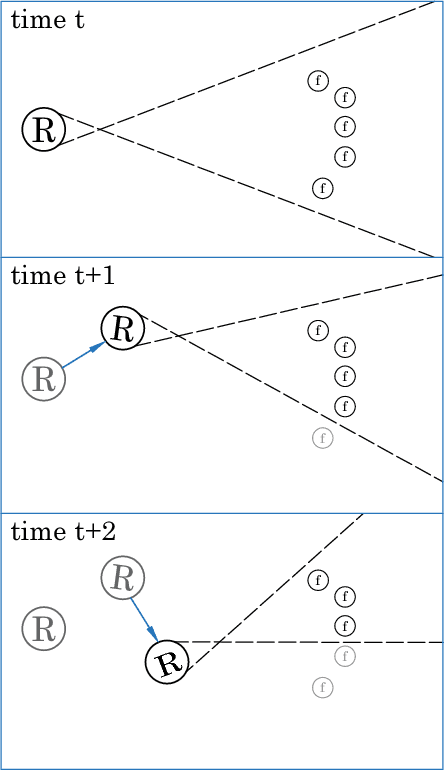
We consider the visual feature selection to improve the estimation quality required for the accurate navigation of a robot. We build upon a key property that asserts: contributions of trackable features (landmarks) appear linearly in the information matrix of the corresponding estimation problem. We utilize standard models for motion and vision system using a camera to formulate the feature selection problem over moving finite time horizons. A scalable randomized sampling algorithm is proposed to select more informative features (and ignore the rest) to achieve a superior position estimation quality. We provide probabilistic performance guarantees for our method. The time-complexity of our feature selection algorithm is linear in the number of candidate features, which is practically plausible and outperforms existing greedy methods that scale quadratically with the number of candidates features. Our numerical simulations confirm that not only the execution time of our proposed method is comparably less than that of the greedy method, but also the resulting estimation quality is very close to the greedy method.