 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGranger Causality Based Hierarchical Time Series Clustering for State Estimation
Apr 09, 2021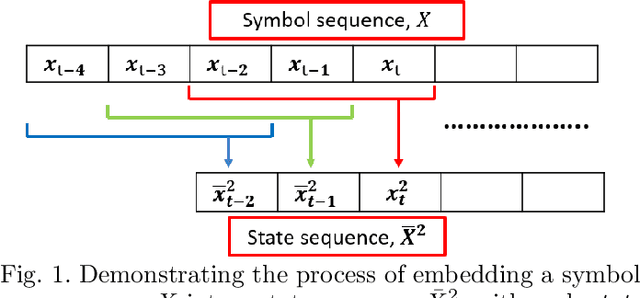
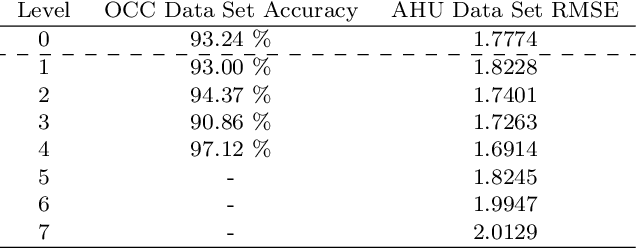
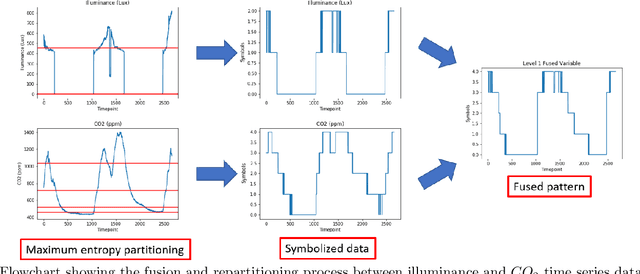
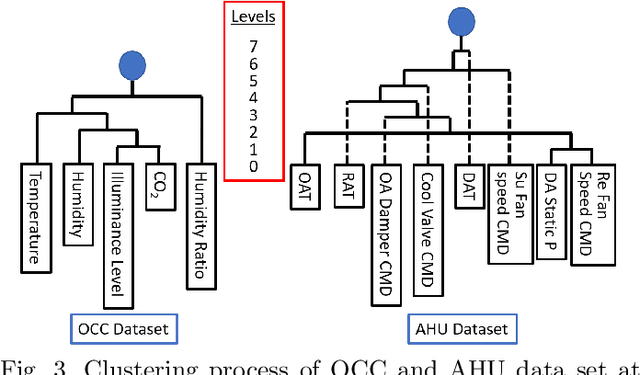
Clustering is an unsupervised learning technique that is useful when working with a large volume of unlabeled data. Complex dynamical systems in real life often entail data streaming from a large number of sources. Although it is desirable to use all source variables to form accurate state estimates, it is often impractical due to large computational power requirements, and sufficiently robust algorithms to handle these cases are not common. We propose a hierarchical time series clustering technique based on symbolic dynamic filtering and Granger causality, which serves as a dimensionality reduction and noise-rejection tool. Our process forms a hierarchy of variables in the multivariate time series with clustering of relevant variables at each level, thus separating out noise and less relevant variables. A new distance metric based on Granger causality is proposed and used for the time series clustering, as well as validated on empirical data sets. Experimental results from occupancy detection and building temperature estimation tasks show fidelity to the empirical data sets while maintaining state-prediction accuracy with substantially reduced data dimensionality.
A modular vision language navigation and manipulation framework for long horizon compositional tasks in indoor environment
Jan 19, 2021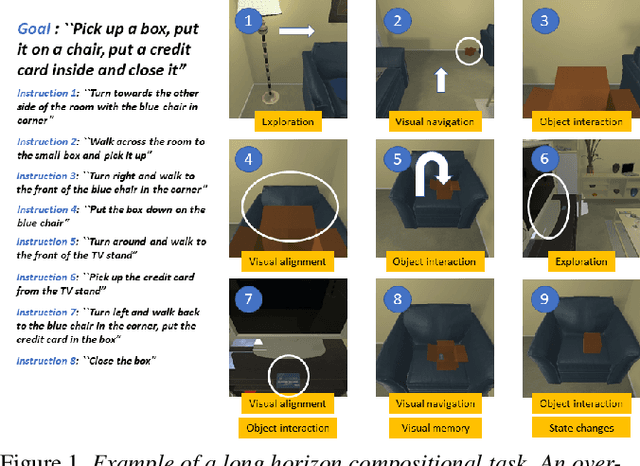
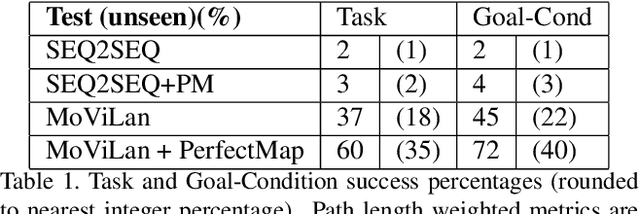
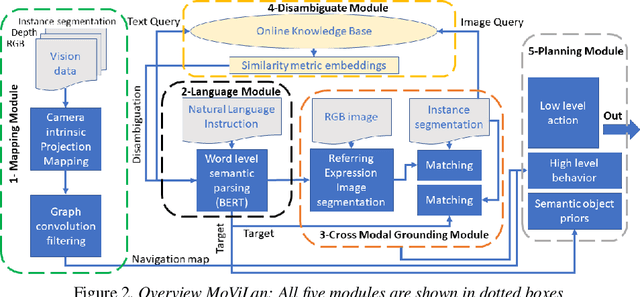
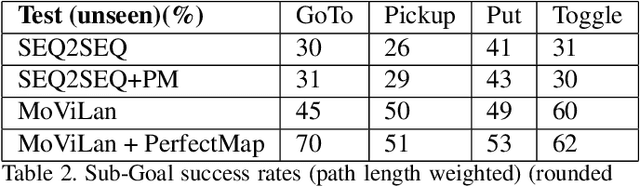
In this paper we propose a new framework - MoViLan (Modular Vision and Language) for execution of visually grounded natural language instructions for day to day indoor household tasks. While several data-driven, end-to-end learning frameworks have been proposed for targeted navigation tasks based on the vision and language modalities, performance on recent benchmark data sets revealed the gap in developing comprehensive techniques for long horizon, compositional tasks (involving manipulation and navigation) with diverse object categories, realistic instructions and visual scenarios with non-reversible state changes. We propose a modular approach to deal with the combined navigation and object interaction problem without the need for strictly aligned vision and language training data (e.g., in the form of expert demonstrated trajectories). Such an approach is a significant departure from the traditional end-to-end techniques in this space and allows for a more tractable training process with separate vision and language data sets. Specifically, we propose a novel geometry-aware mapping technique for cluttered indoor environments, and a language understanding model generalized for household instruction following. We demonstrate a significant increase in success rates for long-horizon, compositional tasks over the baseline on the recently released benchmark data set-ALFRED.
Few shot clustering for indoor occupancy detection with extremely low-quality images from battery free cameras
Aug 13, 2020
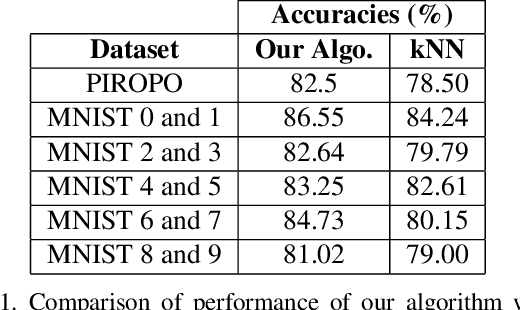

Reliable detection of human occupancy in indoor environments is critical for various energy efficiency, security, and safety applications. We consider this challenge of occupancy detection using extremely low-quality, privacy-preserving images from low power image sensors. We propose a combined few shot learning and clustering algorithm to address this challenge that has very low commissioning and maintenance cost. While the few shot learning concept enables us to commission our system with a few labeled examples, the clustering step serves the purpose of online adaptation to changing imaging environment over time. Apart from validating and comparing our algorithm on benchmark datasets, we also demonstrate performance of our algorithm on streaming images collected from real homes using our novel battery free camera hardware.
A perspective on multi-agent communication for information fusion
Nov 09, 2019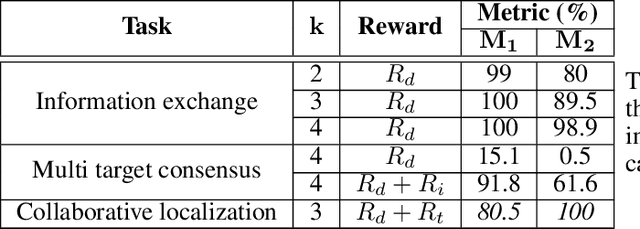
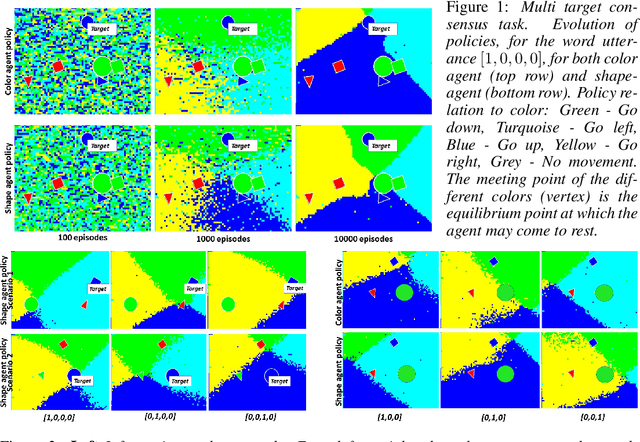
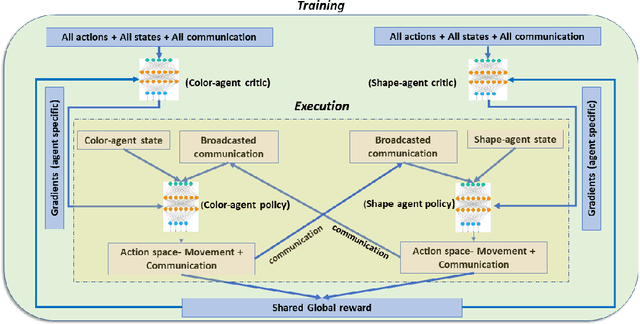

Collaborative decision making in multi-agent systems typically requires a predefined communication protocol among agents. Usually, agent-level observations are locally processed and information is exchanged using the predefined protocol, enabling the team to perform more efficiently than each agent operating in isolation. In this work, we consider the situation where agents, with complementary sensing modalities must co-operate to achieve a common goal/task by learning an efficient communication protocol. We frame the problem within an actor-critic scheme, where the agents learn optimal policies in a centralized fashion, while taking action in a distributed manner. We provide an interpretation of the emergent communication between the agents. We observe that the information exchanged is not just an encoding of the raw sensor data but is, rather, a specific set of directive actions that depend on the overall task. Simulation results demonstrate the interpretability of the learnt communication in a variety of tasks.