 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeX-Ray to CT Rigid Registration Using Scene Coordinate Regression
Nov 25, 2023Intraoperative fluoroscopy is a frequently used modality in minimally invasive orthopedic surgeries. Aligning the intraoperatively acquired X-ray image with the preoperatively acquired 3D model of a computed tomography (CT) scan reduces the mental burden on surgeons induced by the overlapping anatomical structures in the acquired images. This paper proposes a fully automatic registration method that is robust to extreme viewpoints and does not require manual annotation of landmark points during training. It is based on a fully convolutional neural network (CNN) that regresses the scene coordinates for a given X-ray image. The scene coordinates are defined as the intersection of the back-projected rays from a pixel toward the 3D model. Training data for a patient-specific model were generated through a realistic simulation of a C-arm device using preoperative CT scans. In contrast, intraoperative registration was achieved by solving the perspective-n-point (PnP) problem with a random sample and consensus (RANSAC) algorithm. Experiments were conducted using a pelvic CT dataset that included several real fluoroscopic (X-ray) images with ground truth annotations. The proposed method achieved an average mean target registration error (mTRE) of 3.79 mm in the 50th percentile of the simulated test dataset and projected mTRE of 9.65 mm in the 50th percentile of real fluoroscopic images for pelvis registration.
OmniVoxel: A Fast and Precise Reconstruction Method of Omnidirectional Neural Radiance Field
Aug 12, 2022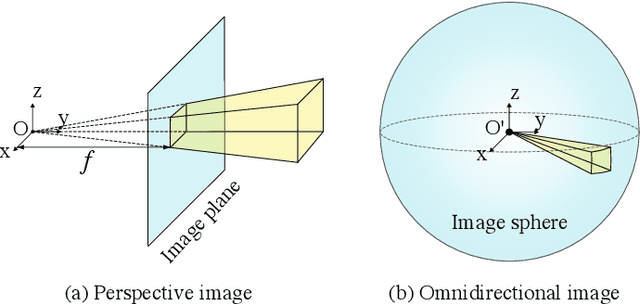
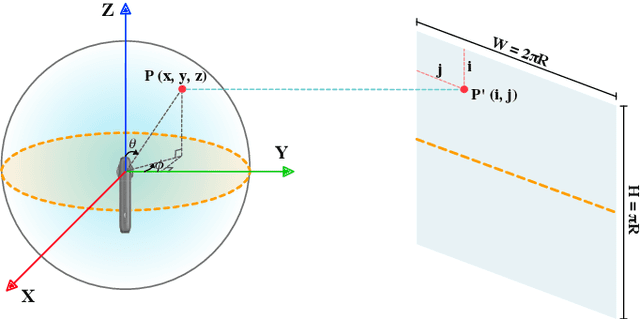

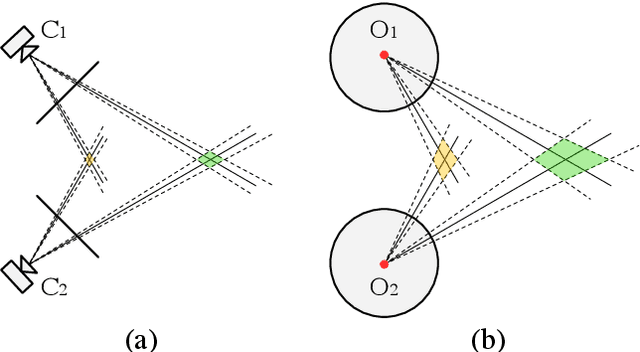
This paper proposes a method to reconstruct the neural radiance field with equirectangular omnidirectional images. Implicit neural scene representation with a radiance field can reconstruct the 3D shape of a scene continuously within a limited spatial area. However, training a fully implicit representation on commercial PC hardware requires a lot of time and computing resources (15 $\sim$ 20 hours per scene). Therefore, we propose a method to accelerate this process significantly (20 $\sim$ 40 minutes per scene). Instead of using a fully implicit representation of rays for radiance field reconstruction, we adopt feature voxels that contain density and color features in tensors. Considering omnidirectional equirectangular input and the camera layout, we use spherical voxelization for representation instead of cubic representation. Our voxelization method could balance the reconstruction quality of the inner scene and outer scene. In addition, we adopt the axis-aligned positional encoding method on the color features to increase the total image quality. Our method achieves satisfying empirical performance on synthetic datasets with random camera poses. Moreover, we test our method with real scenes which contain complex geometries and also achieve state-of-the-art performance. Our code and complete dataset will be released at the same time as the paper publication.
Neural Density-Distance Fields
Jul 29, 2022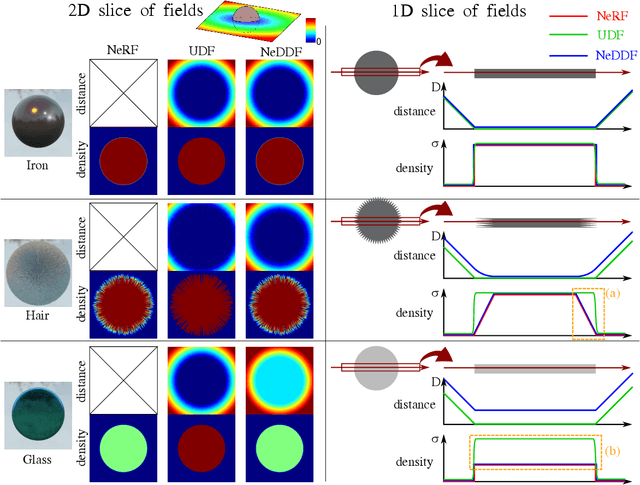

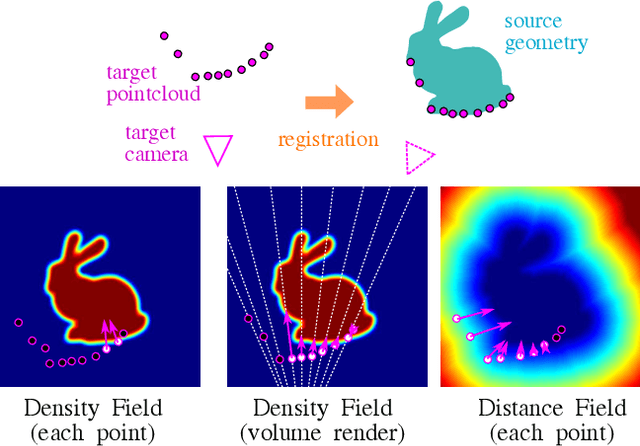
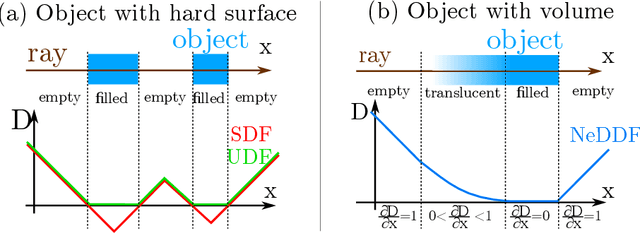
The success of neural fields for 3D vision tasks is now indisputable. Following this trend, several methods aiming for visual localization (e.g., SLAM) have been proposed to estimate distance or density fields using neural fields. However, it is difficult to achieve high localization performance by only density fields-based methods such as Neural Radiance Field (NeRF) since they do not provide density gradient in most empty regions. On the other hand, distance field-based methods such as Neural Implicit Surface (NeuS) have limitations in objects' surface shapes. This paper proposes Neural Density-Distance Field (NeDDF), a novel 3D representation that reciprocally constrains the distance and density fields. We extend distance field formulation to shapes with no explicit boundary surface, such as fur or smoke, which enable explicit conversion from distance field to density field. Consistent distance and density fields realized by explicit conversion enable both robustness to initial values and high-quality registration. Furthermore, the consistency between fields allows fast convergence from sparse point clouds. Experiments show that NeDDF can achieve high localization performance while providing comparable results to NeRF on novel view synthesis. The code is available at https://github.com/ueda0319/neddf.