 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeM3D: Dual-Stream Selective State Spaces and Depth-Driven Framework for High-Fidelity Single-View 3D Reconstruction
Nov 20, 2024The precise reconstruction of 3D objects from a single RGB image in complex scenes presents a critical challenge in virtual reality, autonomous driving, and robotics. Existing neural implicit 3D representation methods face significant difficulties in balancing the extraction of global and local features, particularly in diverse and complex environments, leading to insufficient reconstruction precision and quality. We propose M3D, a novel single-view 3D reconstruction framework, to tackle these challenges. This framework adopts a dual-stream feature extraction strategy based on Selective State Spaces to effectively balance the extraction of global and local features, thereby improving scene comprehension and representation precision. Additionally, a parallel branch extracts depth information, effectively integrating visual and geometric features to enhance reconstruction quality and preserve intricate details. Experimental results indicate that the fusion of multi-scale features with depth information via the dual-branch feature extraction significantly boosts geometric consistency and fidelity, achieving state-of-the-art reconstruction performance.
RayEmb: Arbitrary Landmark Detection in X-Ray Images Using Ray Embedding Subspace
Oct 10, 2024Intra-operative 2D-3D registration of X-ray images with pre-operatively acquired CT scans is a crucial procedure in orthopedic surgeries. Anatomical landmarks pre-annotated in the CT volume can be detected in X-ray images to establish 2D-3D correspondences, which are then utilized for registration. However, registration often fails in certain view angles due to poor landmark visibility. We propose a novel method to address this issue by detecting arbitrary landmark points in X-ray images. Our approach represents 3D points as distinct subspaces, formed by feature vectors (referred to as ray embeddings) corresponding to intersecting rays. Establishing 2D-3D correspondences then becomes a task of finding ray embeddings that are close to a given subspace, essentially performing an intersection test. Unlike conventional methods for landmark estimation, our approach eliminates the need for manually annotating fixed landmarks. We trained our model using the synthetic images generated from CTPelvic1K CLINIC dataset, which contains 103 CT volumes, and evaluated it on the DeepFluoro dataset, comprising real X-ray images. Experimental results demonstrate the superiority of our method over conventional methods. The code is available at https://github.com/Pragyanstha/rayemb.
X-Ray to CT Rigid Registration Using Scene Coordinate Regression
Nov 25, 2023Intraoperative fluoroscopy is a frequently used modality in minimally invasive orthopedic surgeries. Aligning the intraoperatively acquired X-ray image with the preoperatively acquired 3D model of a computed tomography (CT) scan reduces the mental burden on surgeons induced by the overlapping anatomical structures in the acquired images. This paper proposes a fully automatic registration method that is robust to extreme viewpoints and does not require manual annotation of landmark points during training. It is based on a fully convolutional neural network (CNN) that regresses the scene coordinates for a given X-ray image. The scene coordinates are defined as the intersection of the back-projected rays from a pixel toward the 3D model. Training data for a patient-specific model were generated through a realistic simulation of a C-arm device using preoperative CT scans. In contrast, intraoperative registration was achieved by solving the perspective-n-point (PnP) problem with a random sample and consensus (RANSAC) algorithm. Experiments were conducted using a pelvic CT dataset that included several real fluoroscopic (X-ray) images with ground truth annotations. The proposed method achieved an average mean target registration error (mTRE) of 3.79 mm in the 50th percentile of the simulated test dataset and projected mTRE of 9.65 mm in the 50th percentile of real fluoroscopic images for pelvis registration.
OmniVoxel: A Fast and Precise Reconstruction Method of Omnidirectional Neural Radiance Field
Aug 12, 2022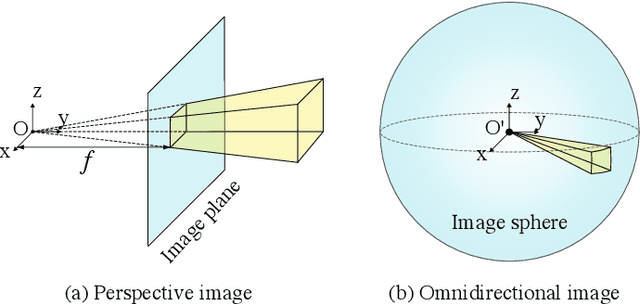
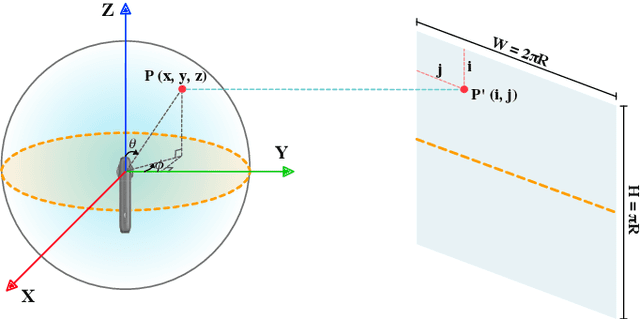

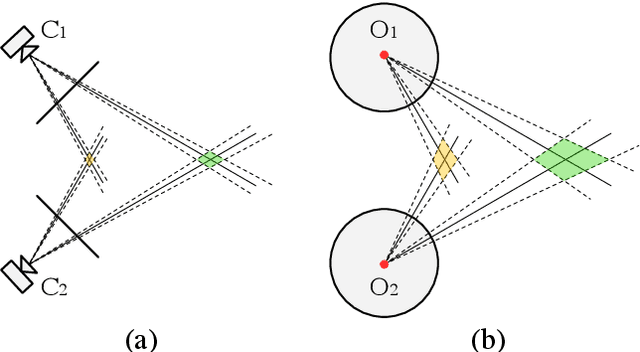
This paper proposes a method to reconstruct the neural radiance field with equirectangular omnidirectional images. Implicit neural scene representation with a radiance field can reconstruct the 3D shape of a scene continuously within a limited spatial area. However, training a fully implicit representation on commercial PC hardware requires a lot of time and computing resources (15 $\sim$ 20 hours per scene). Therefore, we propose a method to accelerate this process significantly (20 $\sim$ 40 minutes per scene). Instead of using a fully implicit representation of rays for radiance field reconstruction, we adopt feature voxels that contain density and color features in tensors. Considering omnidirectional equirectangular input and the camera layout, we use spherical voxelization for representation instead of cubic representation. Our voxelization method could balance the reconstruction quality of the inner scene and outer scene. In addition, we adopt the axis-aligned positional encoding method on the color features to increase the total image quality. Our method achieves satisfying empirical performance on synthetic datasets with random camera poses. Moreover, we test our method with real scenes which contain complex geometries and also achieve state-of-the-art performance. Our code and complete dataset will be released at the same time as the paper publication.