 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward a Rational and Ethical Sociotechnical System of Autonomous Vehicles: A Novel Application of Multi-Criteria Decision Analysis
Feb 04, 2021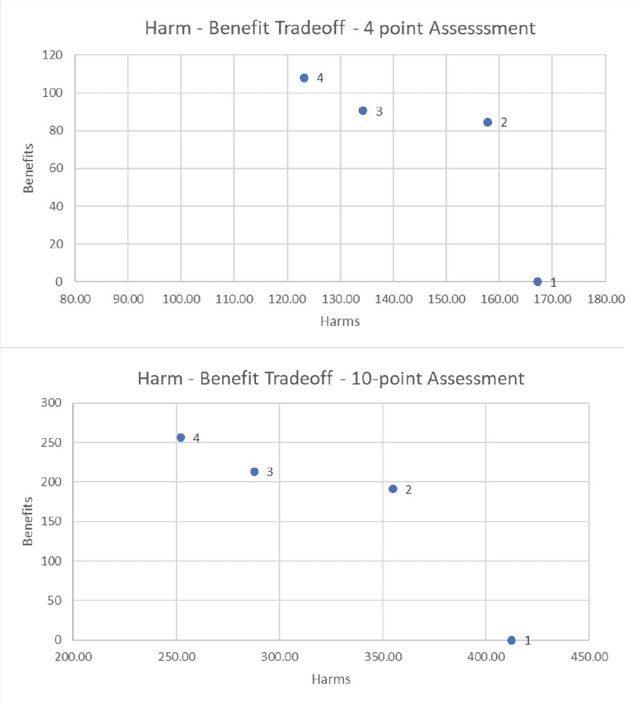
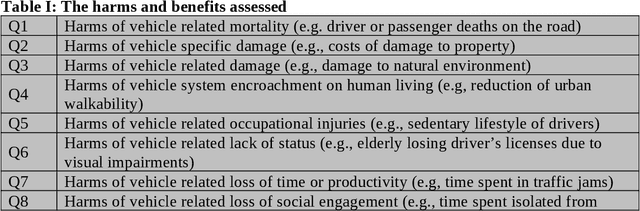
The expansion of artificial intelligence (AI) and autonomous systems has shown the potential to generate enormous social good while also raising serious ethical and safety concerns. AI technology is increasingly adopted in transportation. A survey of various in-vehicle technologies found that approximately 64% of the respondents used a smartphone application to assist with their travel. The top-used applications were navigation and real-time traffic information systems. Among those who used smartphones during their commutes, the top-used applications were navigation and entertainment. There is a pressing need to address relevant social concerns to allow for the development of systems of intelligent agents that are informed and cognizant of ethical standards. Doing so will facilitate the responsible integration of these systems in society. To this end, we have applied Multi-Criteria Decision Analysis (MCDA) to develop a formal Multi-Attribute Impact Assessment (MAIA) questionnaire for examining the social and ethical issues associated with the uptake of AI. We have focused on the domain of autonomous vehicles (AVs) because of their imminent expansion. However, AVs could serve as a stand-in for any domain where intelligent, autonomous agents interact with humans, either on an individual level (e.g., pedestrians, passengers) or a societal level.
A Comparative Analysis of E-Scooter and E-Bike Usage Patterns: Findings from the City of Austin, TX
Jun 07, 2020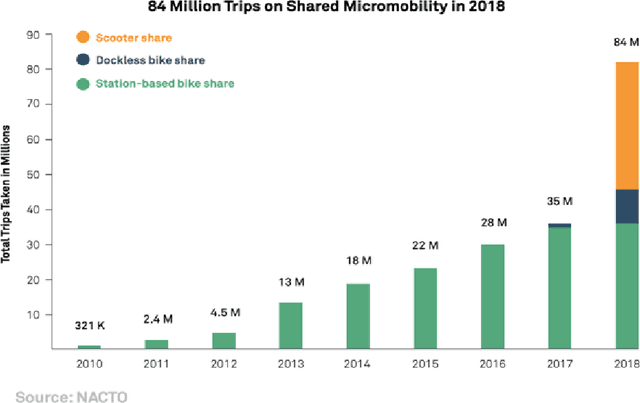
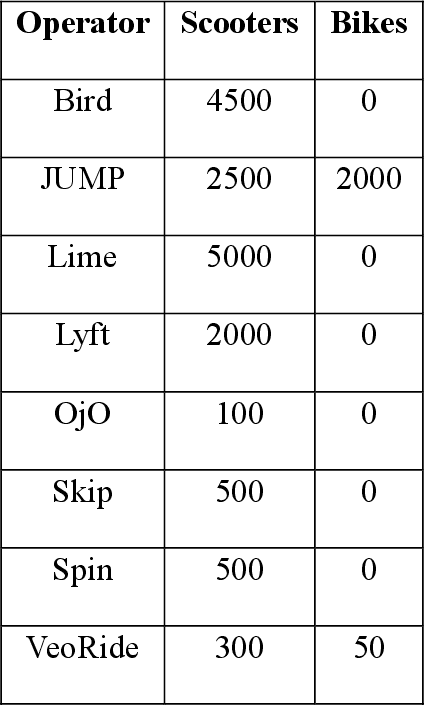
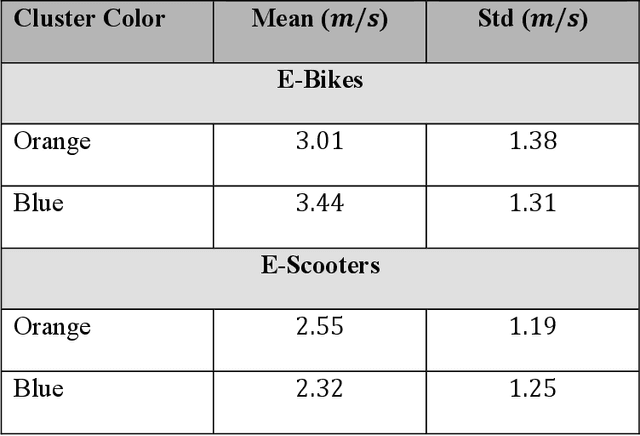
E-scooter-sharing and e-bike-sharing systems are accommodating and easing the increased traffic in dense cities and are expanding considerably. However, these new micro-mobility transportation modes raise numerous operational and safety concerns. This study analyzes e-scooter and dockless e-bike sharing system user behavior. We investigate how average trip speed change depending on the day of the week and the time of the day. We used a dataset from the city of Austin, TX from December 2018 to May 2019. Our results generally show that the trip average speed for e-bikes ranges between 3.01 and 3.44 m/s, which is higher than that for e-scooters (2.19 to 2.78 m/s). Results also show a similar usage pattern for the average speed of e-bikes and e-scooters throughout the days of the week and a different usage pattern for the average speed of e-bikes and e-scooters over the hours of the day. We found that users tend to ride e-bikes and e-scooters with a slower average speed for recreational purposes compared to when they are ridden for commuting purposes. This study is a building block in this field, which serves as a first of its kind, and sheds the light of significant new understanding of this emerging class of shared-road users.
Impact of Narrow Lanes on Arterial Road Vehicle Crashes: A Machine Learning Approach
Nov 07, 2019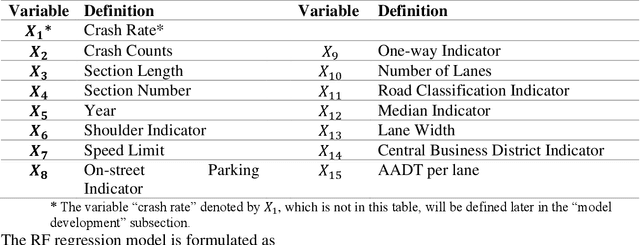
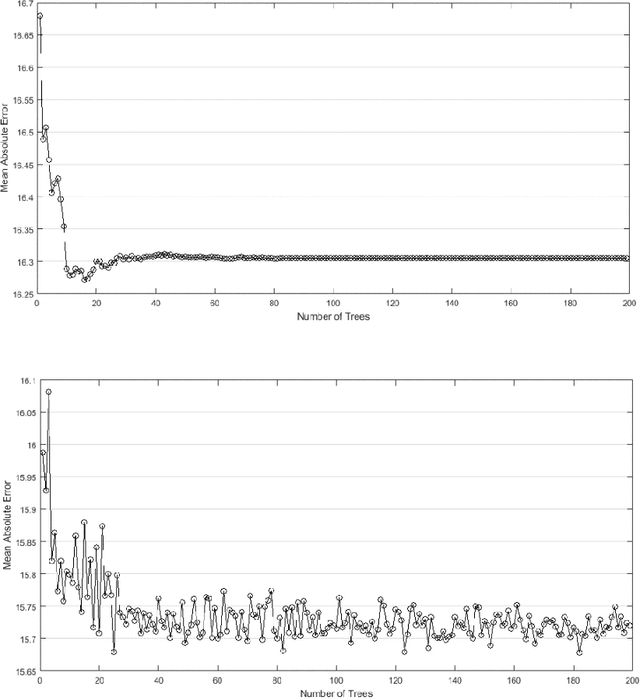
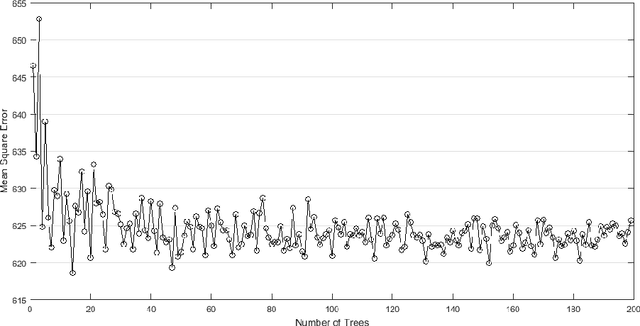

In this paper we adopted state-of-the-art machine learning algorithms, namely: random forest (RF) and least squares boosting, to model crash data and identify the optimum model to study the impact of narrow lanes on the safety of arterial roads. Using a ten-year crash dataset in four cities in Nebraska, two machine learning models were assessed based on the prediction error. The RF model was identified as the best model. The RF was used to compute the importance of the lane width predictors in our regression model based on two different measures. Subsequently, the RF model was used to simulate the crash rate for different lane widths. The Kruskal-Wallis test, was then conducted to determine if simulated values from the four lane width groups have equal means. The test null hypothesis of equal means for simulated values from the four lane width groups was rejected. Consequently, it was concluded that the crash rates from at least one lane width group was statistically different from the others. Finally, the results from the pairwise comparisons using the Tukey and Kramer test showed that the changes in crash rates between any two lane width conditions were statistically significant.
Acceptable Planning: Influencing Individual Behavior to Reduce Transportation Energy Expenditure of a City
Sep 23, 2019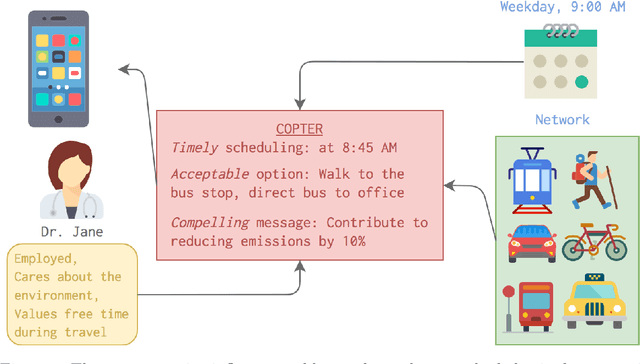
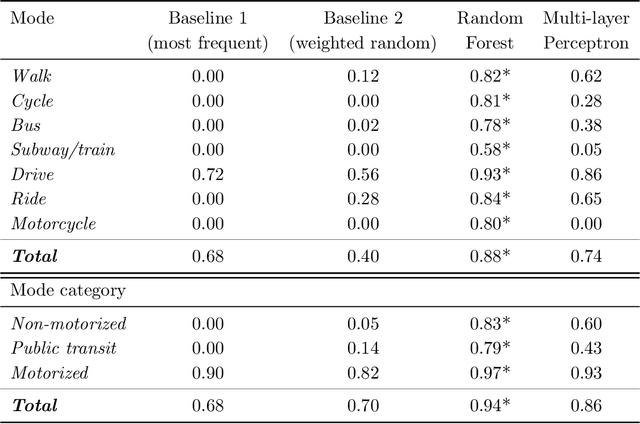

Our research aims at developing intelligent systems to reduce the transportation-related energy expenditure of a large city by influencing individual behavior. We introduce COPTER - an intelligent travel assistant that evaluates multi-modal travel alternatives to find a plan that is acceptable to a person given their context and preferences. We propose a formulation for acceptable planning that brings together ideas from AI, machine learning, and economics. This formulation has been incorporated in COPTER that produces acceptable plans in real-time. We adopt a novel empirical evaluation framework that combines human decision data with a high fidelity multi-modal transportation simulation to demonstrate a 4\% energy reduction and 20\% delay reduction in a realistic deployment scenario in Los Angeles, California, USA.