 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Power of Combined Modalities in Interactive Robot Learning
May 13, 2024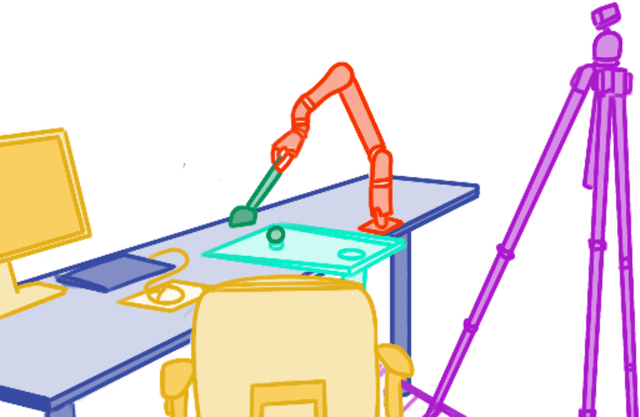
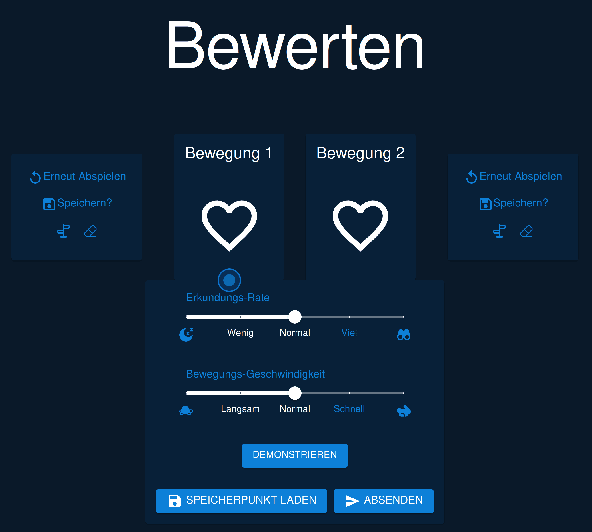
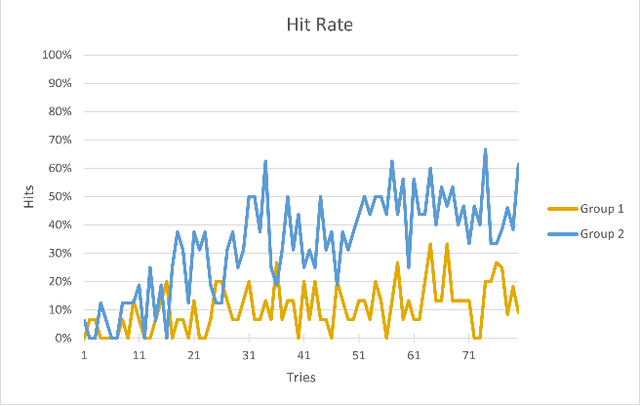
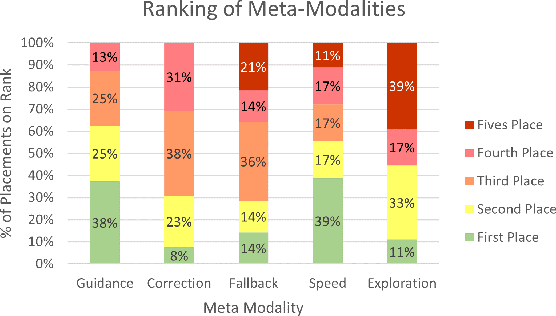
This study contributes to the evolving field of robot learning in interaction with humans, examining the impact of diverse input modalities on learning outcomes. It introduces the concept of "meta-modalities" which encapsulate additional forms of feedback beyond the traditional preference and scalar feedback mechanisms. Unlike prior research that focused on individual meta-modalities, this work evaluates their combined effect on learning outcomes. Through a study with human participants, we explore user preferences for these modalities and their impact on robot learning performance. Our findings reveal that while individual modalities are perceived differently, their combination significantly improves learning behavior and usability. This research not only provides valuable insights into the optimization of human-robot interactive task learning but also opens new avenues for enhancing the interactive freedom and scaffolding capabilities provided to users in such settings.
What you need to know about a learning robot: Identifying the enabling architecture of complex systems
Nov 24, 2023Nowadays, we are dealing more and more with robots and AI in everyday life. However, their behavior is not always apparent to most lay users, especially in error situations. As a result, there can be misconceptions about the behavior of the technologies in use. This, in turn, can lead to misuse and rejection by users. Explanation, for example, through transparency, can address these misconceptions. However, it would be confusing and overwhelming for users if the entire software or hardware was explained. Therefore, this paper looks at the 'enabling' architecture. It describes those aspects of a robotic system that might need to be explained to enable someone to use the technology effectively. Furthermore, this paper is concerned with the 'explanandum', which is the corresponding misunderstanding or missing concepts of the enabling architecture that needs to be clarified. We have thus developed and present an approach for determining this 'enabling' architecture and the resulting 'explanandum' of complex technologies.
Forms of Understanding of XAI-Explanations
Nov 15, 2023

Explainability has become an important topic in computer science and artificial intelligence, leading to a subfield called Explainable Artificial Intelligence (XAI). The goal of providing or seeking explanations is to achieve (better) 'understanding' on the part of the explainee. However, what it means to 'understand' is still not clearly defined, and the concept itself is rarely the subject of scientific investigation. This conceptual article aims to present a model of forms of understanding in the context of XAI and beyond. From an interdisciplinary perspective bringing together computer science, linguistics, sociology, and psychology, a definition of understanding and its forms, assessment, and dynamics during the process of giving everyday explanations are explored. Two types of understanding are considered as possible outcomes of explanations, namely enabledness, 'knowing how' to do or decide something, and comprehension, 'knowing that' -- both in different degrees (from shallow to deep). Explanations regularly start with shallow understanding in a specific domain and can lead to deep comprehension and enabledness of the explanandum, which we see as a prerequisite for human users to gain agency. In this process, the increase of comprehension and enabledness are highly interdependent. Against the background of this systematization, special challenges of understanding in XAI are discussed.