 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime-frequency localization of bird calls in dense soundscapes
Jun 09, 2026Passive acoustic monitoring enables large-scale observation of wildlife, but most bioacoustic classifiers only predict species presence in a time window without localizing vocalizations precisely in time or frequency, limiting downstream analyses. We formulate bird vocalization detection as an object detection task on spectrograms and train YOLO11 models to localize bird calls in dense tropical soundscapes from Singapore. We additionally introduce an open-source browser-based annotation tool and propose Intersection over Minimum (IoMin), an evaluation metric that better handles ambiguous acoustic boundaries than standard IoU and is better suited to the problem at hand. The best YOLO model nearly doubles baseline performance on in-distribution soundscapes from Singapore (81.8% vs. 42.1% IoMin@50 F1-score) while still outperforming the baseline on unseen out-of-distribution recordings from Hawaii (58.6% vs. 48.6%). These results suggest that object detection frameworks are a promising approach to time-frequency localization of animal vocalizations in complex soundscapes.
Joint Source-Environment Adaptation of Data-Driven Underwater Acoustic Source Ranging Based on Model Uncertainty
Mar 30, 2025



Adapting pre-trained deep learning models to new and unknown environments is a difficult challenge in underwater acoustic localization. We show that although pre-trained models have performance that suffers from mismatch between the training and test data, they generally exhibit a higher ``implied uncertainty'' in environments where there is more mismatch. Leveraging this notion of implied uncertainty, we partition the test samples into more certain and less certain sets, and implement an estimation method using the certain samples to improve the labeling for uncertain samples, which helps to adapt the model. We use an efficient method to quantify model prediction uncertainty, and an innovative approach to adapt a pre-trained model to unseen underwater environments at test time. This eliminates the need for labeled data from the target environment or the original training data. This adaptation is enhanced by integrating an independent estimate based on the received signal energy. We validate the approach extensively using real experimental data, as well as synthetic data consisting of model-generated signals with real ocean noise. The results demonstrate significant improvements in model prediction accuracy, underscoring the potential of the method to enhance underwater acoustic localization in diverse, noisy, and unknown environments.
Image Compression Using Novel View Synthesis Priors
Nov 21, 2024



Real-time visual feedback is essential for tetherless control of remotely operated vehicles, particularly during inspection and manipulation tasks. Though acoustic communication is the preferred choice for medium-range communication underwater, its limited bandwidth renders it impractical to transmit images or videos in real-time. To address this, we propose a model-based image compression technique that leverages prior mission information. Our approach employs trained machine-learning based novel view synthesis models, and uses gradient descent optimization to refine latent representations to help generate compressible differences between camera images and rendered images. We evaluate the proposed compression technique using a dataset from an artificial ocean basin, demonstrating superior compression ratios and image quality over existing techniques. Moreover, our method exhibits robustness to introduction of new objects within the scene, highlighting its potential for advancing tetherless remotely operated vehicle operations.
Pose Estimation from Camera Images for Underwater Inspection
Jul 24, 2024High-precision localization is pivotal in underwater reinspection missions. Traditional localization methods like inertial navigation systems, Doppler velocity loggers, and acoustic positioning face significant challenges and are not cost-effective for some applications. Visual localization is a cost-effective alternative in such cases, leveraging the cameras already equipped on inspection vehicles to estimate poses from images of the surrounding scene. Amongst these, machine learning-based pose estimation from images shows promise in underwater environments, performing efficient relocalization using models trained based on previously mapped scenes. We explore the efficacy of learning-based pose estimators in both clear and turbid water inspection missions, assessing the impact of image formats, model architectures and training data diversity. We innovate by employing novel view synthesis models to generate augmented training data, significantly enhancing pose estimation in unexplored regions. Moreover, we enhance localization accuracy by integrating pose estimator outputs with sensor data via an extended Kalman filter, demonstrating improved trajectory smoothness and accuracy.
Improved Image-based Pose Regressor Models for Underwater Environments
Mar 13, 2024



We investigate the performance of image-based pose regressor models in underwater environments for relocalization. Leveraging PoseNet and PoseLSTM, we regress a 6-degree-of-freedom pose from single RGB images with high accuracy. Additionally, we explore data augmentation with stereo camera images to improve model accuracy. Experimental results demonstrate that the models achieve high accuracy in both simulated and clear waters, promising effective real-world underwater navigation and inspection applications.
Online Segmented Recursive Least-Squares for Multipath Doppler Tracking
May 30, 2023


Underwater communication signals typically suffer from distortion due to motion-induced Doppler. Especially in shallow water environments, recovering the signal is challenging due to the time-varying Doppler effects distorting each path differently. However, conventional Doppler estimation algorithms typically model uniform Doppler across all paths and often fail to provide robust Doppler tracking in multipath environments. In this paper, we propose a dynamic programming-inspired method, called online segmented recursive least-squares (OSRLS) to sequentially estimate the time-varying non-uniform Doppler across different multipath arrivals. By approximating the non-linear time distortion as a piece-wise-linear Markov model, we formulate the problem in a dynamic programming framework known as segmented least-squares (SLS). In order to circumvent an ill-conditioned formulation, perturbations are added to the Doppler model during the linearization process. The successful operation of the algorithm is demonstrated in a simulation on a synthetic channel with time-varying non-uniform Doppler.
A Semi-Blind Method for Localization of Underwater Acoustic Sources
Oct 27, 2021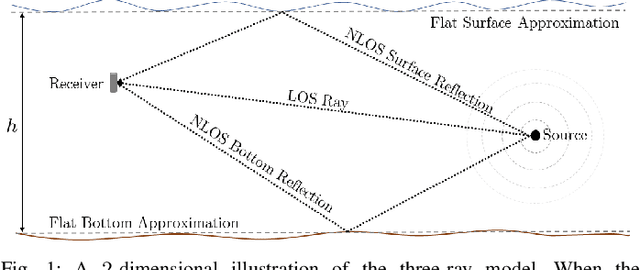
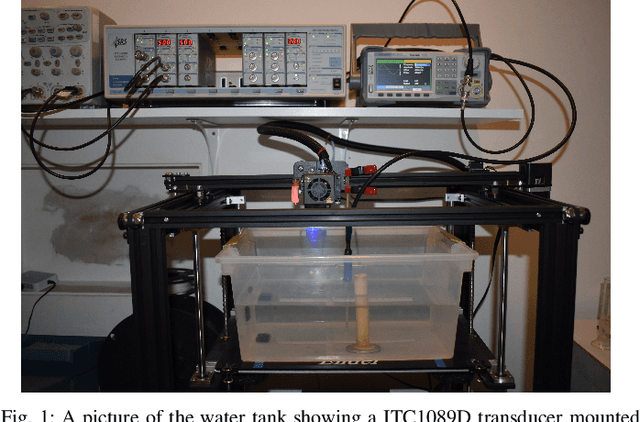
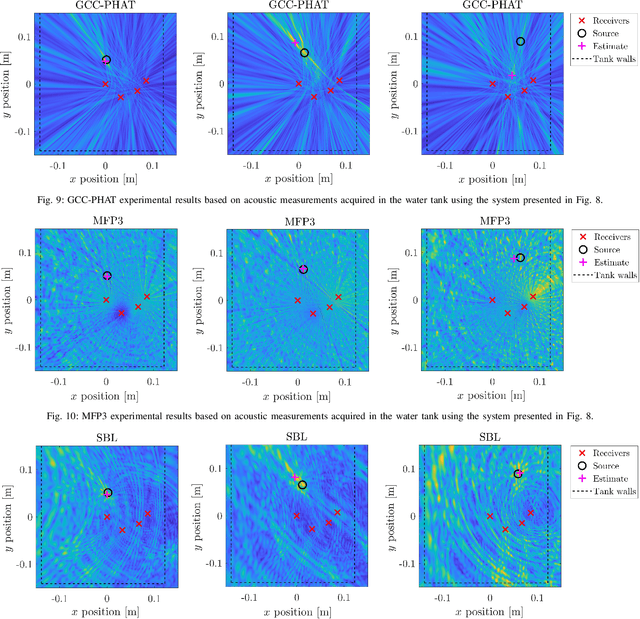
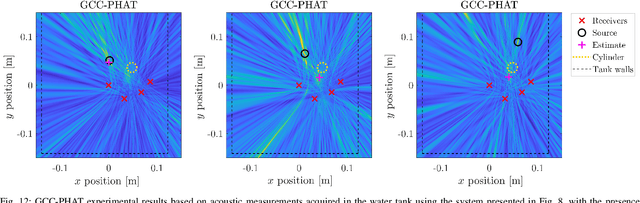
Underwater acoustic localization has traditionally been challenging due to the presence of unknown environmental structure and dynamic conditions. The problem is richer still when such structure includes occlusion, which causes the loss of line-of-sight (LOS) between the acoustic source and the receivers, on which many of the existing localization algorithms rely. We develop a semi-blind passive localization method capable of accurately estimating the source's position even in the possible absence of LOS between the source and all receivers. Based on typically-available prior knowledge of the water surface and bottom, we derive a closed-form expression for the optimal estimator under a multi-ray propagation model, which is suitable for shallow-water environments and high-frequency signals. By exploiting a computationally efficient form of this estimator, our methodology makes comparatively high-resolution localization feasible. We also derive the Cram\'er-Rao bound for this model, which can be used to guide the placement of collections of receivers so as to optimize localization accuracy. The method improves a balance of accuracy and robustness to environmental model mismatch, relative to existing localization methods that are useful in similar settings. The method is validated with simulations and water tank experiments.