 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-Fidelity Simulation and Novel Data Analysis of the Bubble Creation and Sound Generation Processes in Breaking Waves
Nov 06, 2022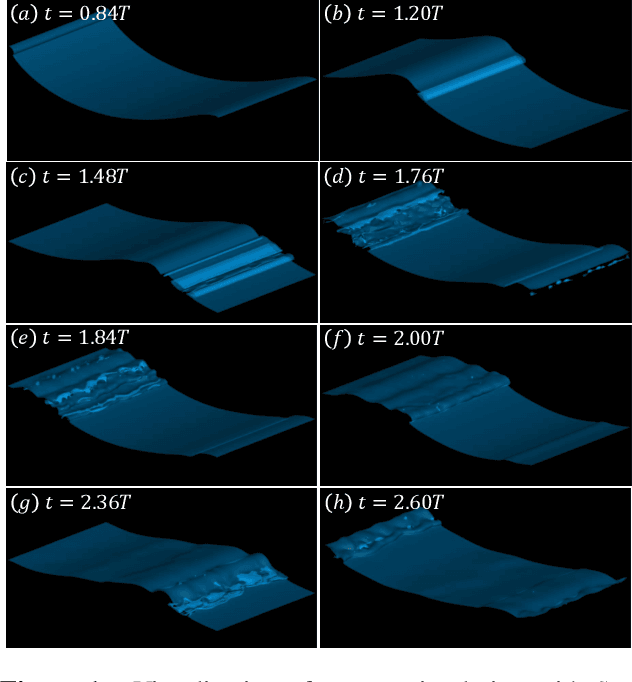
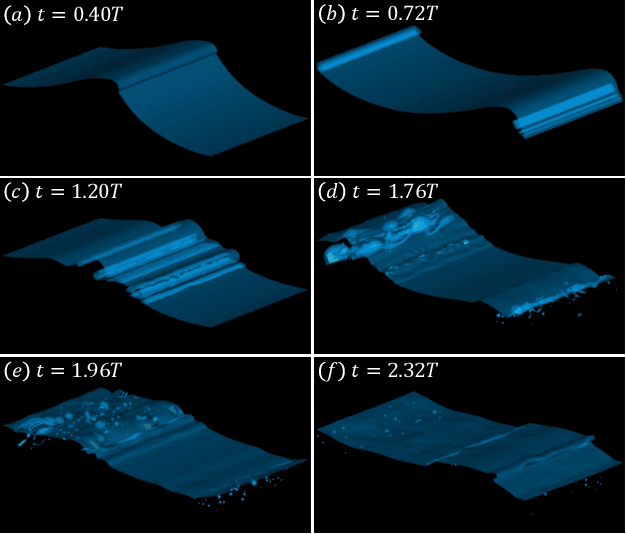
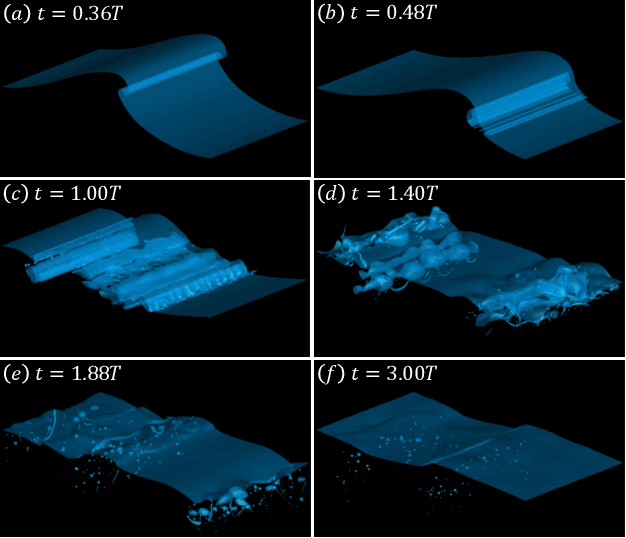
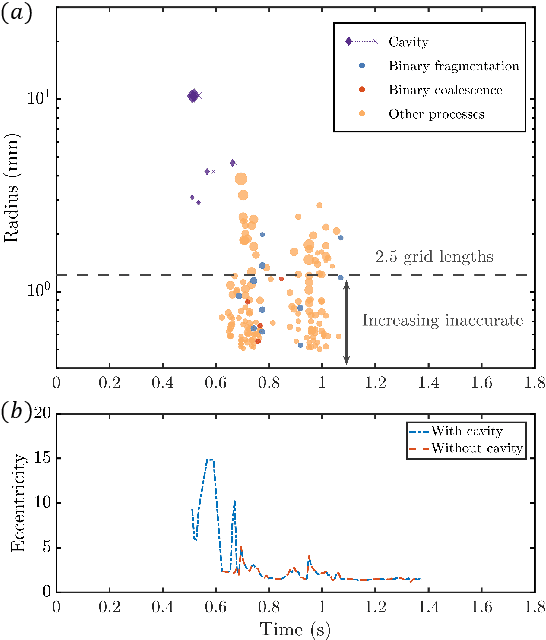
Recent increases in computing power have enabled the numerical simulation of many complex flow problems that are of practical and strategic interest for naval applications. A noticeable area of advancement is the computation of turbulent, two-phase flows resulting from wave breaking and other multiphase flow processes such as cavitation that can generate underwater sound and entrain bubbles in ship wakes, among other effects. Although advanced flow solvers are sophisticated and are capable of simulating high Reynolds number flows on large numbers of grid points, challenges in data analysis remain. Specifically, there is a critical need to transform highly resolved flow fields described on fine grids at discrete time steps into physically resolved features for which the flow dynamics can be understood and utilized in naval applications. This paper presents our recent efforts in this field. In previous works, we developed a novel algorithm to track bubbles in breaking wave simulations and to interpret their dynamical behavior over time (Gao et al., 2021a). We also discovered a new physical mechanism driving bubble production within breaking wave crests (Gao et al., 2021b) and developed a model to relate bubble behaviors to underwater sound generation (Gao et al., 2021c). In this work, we applied our bubble tracking algorithm to the breaking waves simulations and investigated the bubble trajectories, bubble creation mechanisms, and bubble acoustics based on our previous works.
* conference
A Semi-Blind Method for Localization of Underwater Acoustic Sources
Oct 27, 2021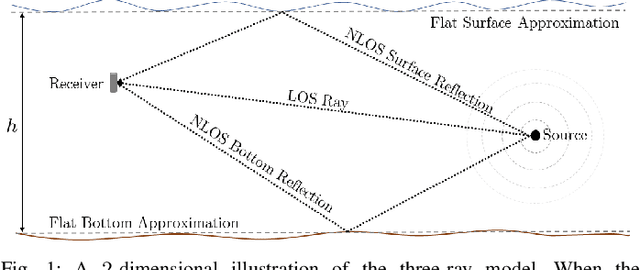
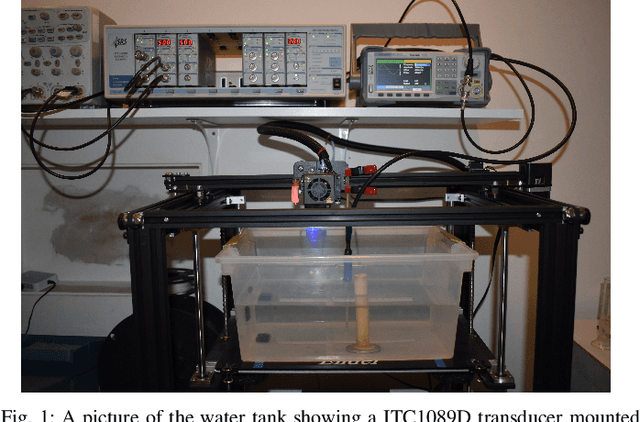
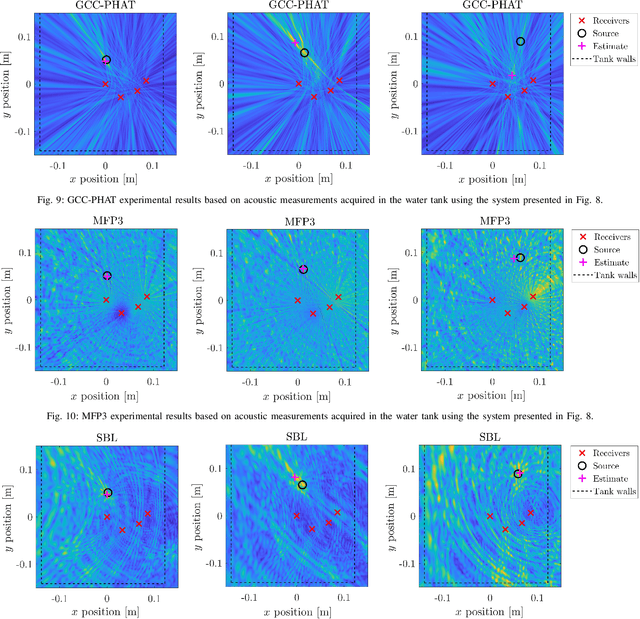
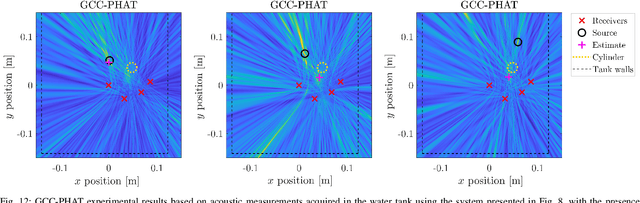
Underwater acoustic localization has traditionally been challenging due to the presence of unknown environmental structure and dynamic conditions. The problem is richer still when such structure includes occlusion, which causes the loss of line-of-sight (LOS) between the acoustic source and the receivers, on which many of the existing localization algorithms rely. We develop a semi-blind passive localization method capable of accurately estimating the source's position even in the possible absence of LOS between the source and all receivers. Based on typically-available prior knowledge of the water surface and bottom, we derive a closed-form expression for the optimal estimator under a multi-ray propagation model, which is suitable for shallow-water environments and high-frequency signals. By exploiting a computationally efficient form of this estimator, our methodology makes comparatively high-resolution localization feasible. We also derive the Cram\'er-Rao bound for this model, which can be used to guide the placement of collections of receivers so as to optimize localization accuracy. The method improves a balance of accuracy and robustness to environmental model mismatch, relative to existing localization methods that are useful in similar settings. The method is validated with simulations and water tank experiments.