 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime-frequency localization of bird calls in dense soundscapes
Jun 09, 2026Passive acoustic monitoring enables large-scale observation of wildlife, but most bioacoustic classifiers only predict species presence in a time window without localizing vocalizations precisely in time or frequency, limiting downstream analyses. We formulate bird vocalization detection as an object detection task on spectrograms and train YOLO11 models to localize bird calls in dense tropical soundscapes from Singapore. We additionally introduce an open-source browser-based annotation tool and propose Intersection over Minimum (IoMin), an evaluation metric that better handles ambiguous acoustic boundaries than standard IoU and is better suited to the problem at hand. The best YOLO model nearly doubles baseline performance on in-distribution soundscapes from Singapore (81.8% vs. 42.1% IoMin@50 F1-score) while still outperforming the baseline on unseen out-of-distribution recordings from Hawaii (58.6% vs. 48.6%). These results suggest that object detection frameworks are a promising approach to time-frequency localization of animal vocalizations in complex soundscapes.
Semi-supervised classification of bird vocalizations
Feb 19, 2025
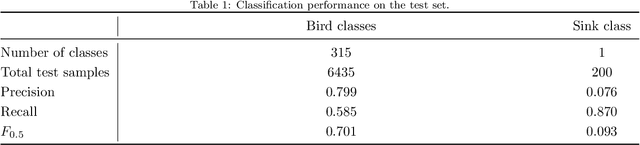
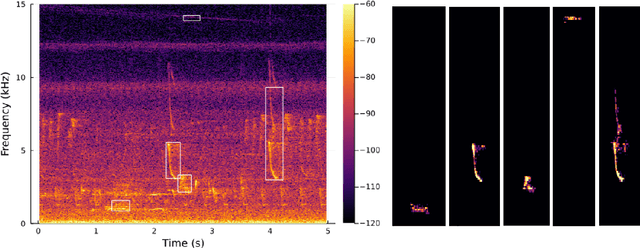

Changes in bird populations can indicate broader changes in ecosystems, making birds one of the most important animal groups to monitor. Combining machine learning and passive acoustics enables continuous monitoring over extended periods without direct human involvement. However, most existing techniques require extensive expert-labeled datasets for training and cannot easily detect time-overlapping calls in busy soundscapes. We propose a semi-supervised acoustic bird detector designed to allow both the detection of time-overlapping calls (when separated in frequency) and the use of few labeled training samples. The classifier is trained and evaluated on a combination of community-recorded open-source data and long-duration soundscape recordings from Singapore. It achieves a mean F0.5 score of 0.701 across 315 classes from 110 bird species on a hold-out test set, with an average of 11 labeled training samples per class. It outperforms the state-of-the-art BirdNET classifier on a test set of 103 bird species despite significantly fewer labeled training samples. The detector is further tested on 144 microphone-hours of continuous soundscape data. The rich soundscape in Singapore makes suppression of false positives a challenge on raw, continuous data streams. Nevertheless, we demonstrate that achieving high precision in such environments with minimal labeled training data is possible.
Image Compression Using Novel View Synthesis Priors
Nov 21, 2024



Real-time visual feedback is essential for tetherless control of remotely operated vehicles, particularly during inspection and manipulation tasks. Though acoustic communication is the preferred choice for medium-range communication underwater, its limited bandwidth renders it impractical to transmit images or videos in real-time. To address this, we propose a model-based image compression technique that leverages prior mission information. Our approach employs trained machine-learning based novel view synthesis models, and uses gradient descent optimization to refine latent representations to help generate compressible differences between camera images and rendered images. We evaluate the proposed compression technique using a dataset from an artificial ocean basin, demonstrating superior compression ratios and image quality over existing techniques. Moreover, our method exhibits robustness to introduction of new objects within the scene, highlighting its potential for advancing tetherless remotely operated vehicle operations.
Pose Estimation from Camera Images for Underwater Inspection
Jul 24, 2024High-precision localization is pivotal in underwater reinspection missions. Traditional localization methods like inertial navigation systems, Doppler velocity loggers, and acoustic positioning face significant challenges and are not cost-effective for some applications. Visual localization is a cost-effective alternative in such cases, leveraging the cameras already equipped on inspection vehicles to estimate poses from images of the surrounding scene. Amongst these, machine learning-based pose estimation from images shows promise in underwater environments, performing efficient relocalization using models trained based on previously mapped scenes. We explore the efficacy of learning-based pose estimators in both clear and turbid water inspection missions, assessing the impact of image formats, model architectures and training data diversity. We innovate by employing novel view synthesis models to generate augmented training data, significantly enhancing pose estimation in unexplored regions. Moreover, we enhance localization accuracy by integrating pose estimator outputs with sensor data via an extended Kalman filter, demonstrating improved trajectory smoothness and accuracy.
Improved Image-based Pose Regressor Models for Underwater Environments
Mar 13, 2024



We investigate the performance of image-based pose regressor models in underwater environments for relocalization. Leveraging PoseNet and PoseLSTM, we regress a 6-degree-of-freedom pose from single RGB images with high accuracy. Additionally, we explore data augmentation with stereo camera images to improve model accuracy. Experimental results demonstrate that the models achieve high accuracy in both simulated and clear waters, promising effective real-world underwater navigation and inspection applications.
Data-aided Underwater Acoustic Ray Propagation Modeling
May 12, 2022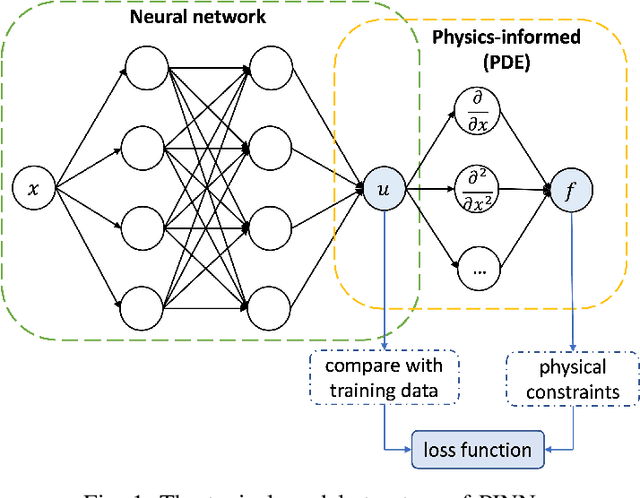
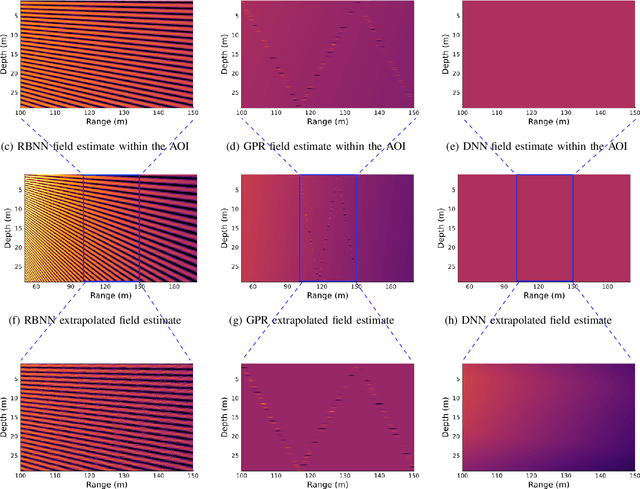
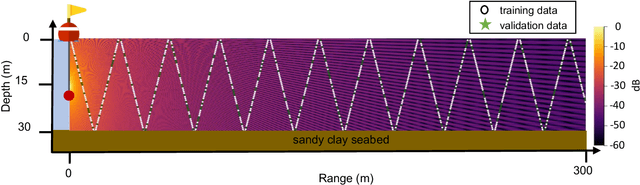
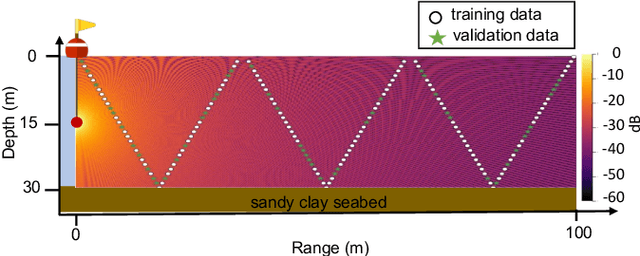
Acoustic propagation models are widely used in numerous oceanic and other underwater applications. Most conventional models are approximate solutions of the acoustic wave equation, and require accurate environmental knowledge to be available beforehand. Environmental parameters may not always be easily or accurately measurable. While data-driven techniques might allow us to model acoustic propagation without the need for extensive prior environmental knowledge, such techniques tend to be data-hungry and often infeasible in oceanic applications where data collection is difficult and expensive. We propose a data-aided ray physics based high frequency acoustic propagation modeling approach that enables us to train models with only a small amount of data. The proposed framework is not only data-efficient, but also offers flexibility to incorporate varying degrees of environmental knowledge, and generalizes well to permit extrapolation beyond the area where data was collected. We demonstrate the feasibility and applicability of our method through four numerical case studies, and one controlled experiment. We also benchmark our method's performance against classical data-driven techniques.
New Metrics Between Rational Spectra and their Connection to Optimal Transport
Apr 20, 2020
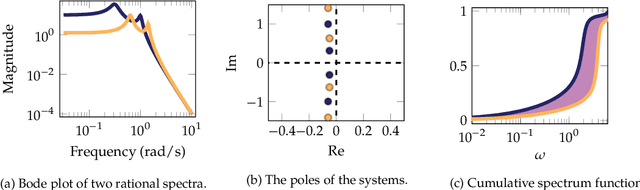


We propose a series of metrics between pairs of signals, linear systems or rational spectra, based on optimal transport and linear-systems theory. The metrics operate on the locations of the poles of rational functions and admit very efficient computation of distances, barycenters, displacement interpolation and projections. We establish the connection to the Wasserstein distance between rational spectra, and demonstrate the use of the metrics in tasks such as signal classification, clustering, detection and approximation.