 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe NVIDIA PilotNet Experiments
Oct 17, 2020
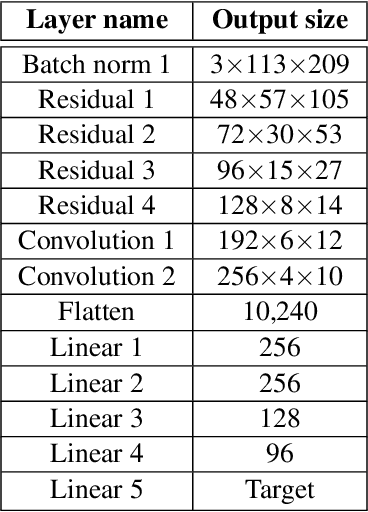
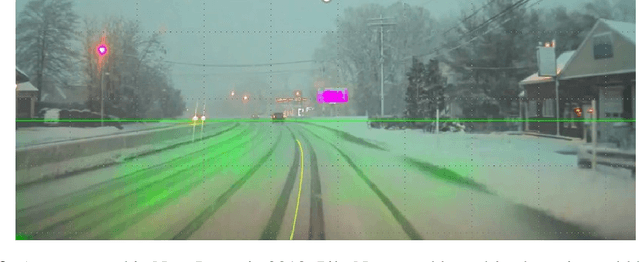

Four years ago, an experimental system known as PilotNet became the first NVIDIA system to steer an autonomous car along a roadway. This system represents a departure from the classical approach for self-driving in which the process is manually decomposed into a series of modules, each performing a different task. In PilotNet, on the other hand, a single deep neural network (DNN) takes pixels as input and produces a desired vehicle trajectory as output; there are no distinct internal modules connected by human-designed interfaces. We believe that handcrafted interfaces ultimately limit performance by restricting information flow through the system and that a learned approach, in combination with other artificial intelligence systems that add redundancy, will lead to better overall performing systems. We continue to conduct research toward that goal. This document describes the PilotNet lane-keeping effort, carried out over the past five years by our NVIDIA PilotNet group in Holmdel, New Jersey. Here we present a snapshot of system status in mid-2020 and highlight some of the work done by the PilotNet group.
Deep Predictive Coding Network with Local Recurrent Processing for Object Recognition
Oct 26, 2018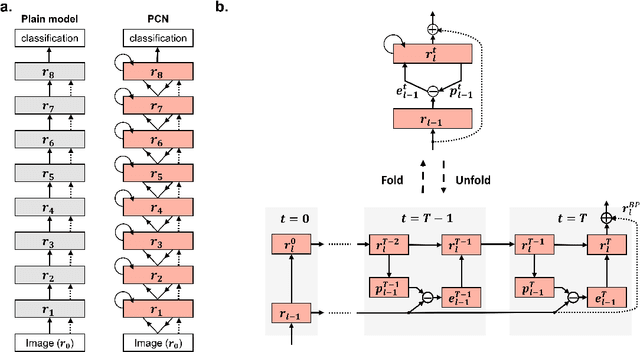
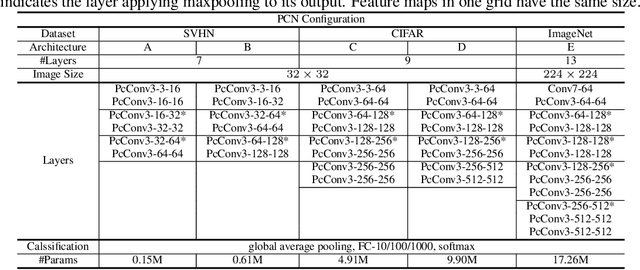
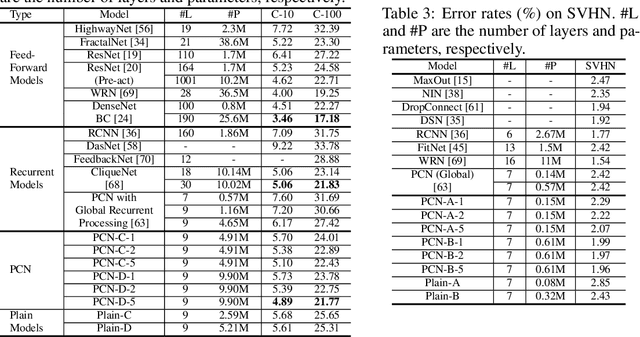
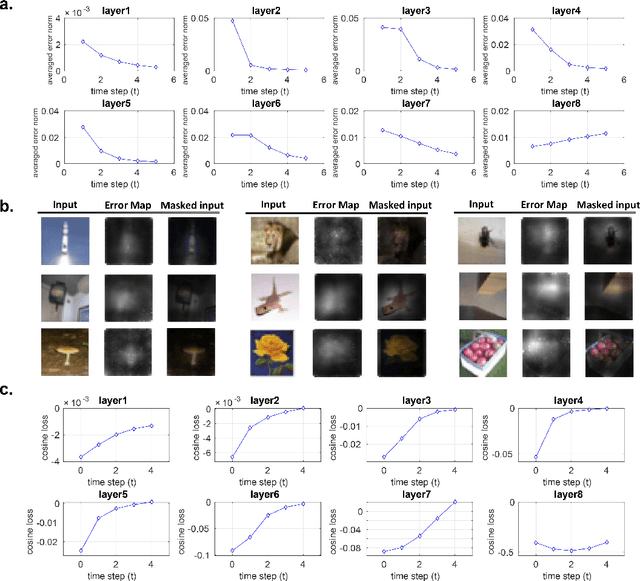
Inspired by "predictive coding" - a theory in neuroscience, we develop a bi-directional and dynamic neural network with local recurrent processing, namely predictive coding network (PCN). Unlike feedforward-only convolutional neural networks, PCN includes both feedback connections, which carry top-down predictions, and feedforward connections, which carry bottom-up errors of prediction. Feedback and feedforward connections enable adjacent layers to interact locally and recurrently to refine representations towards minimization of layer-wise prediction errors. When unfolded over time, the recurrent processing gives rise to an increasingly deeper hierarchy of non-linear transformation, allowing a shallow network to dynamically extend itself into an arbitrarily deep network. We train and test PCN for image classification with SVHN, CIFAR and ImageNet datasets. Despite notably fewer layers and parameters, PCN achieves competitive performance compared to classical and state-of-the-art models. Further analysis shows that the internal representations in PCN converge over time and yield increasingly better accuracy in object recognition. Errors of top-down prediction also reveal visual saliency or bottom-up attention.
Deep Predictive Coding Network for Object Recognition
Jul 29, 2018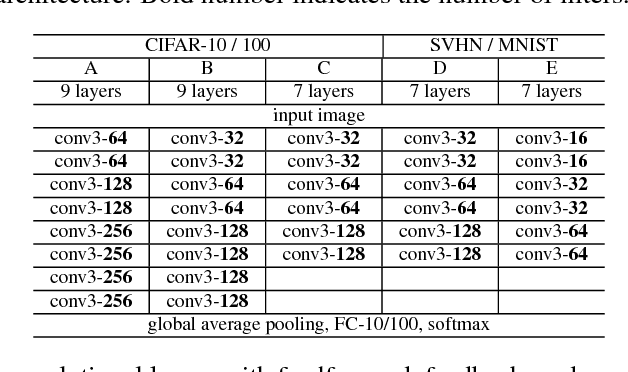
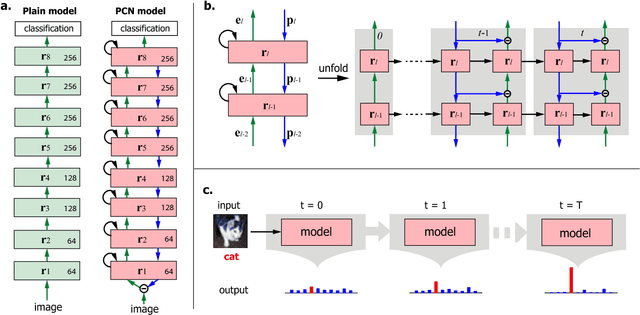
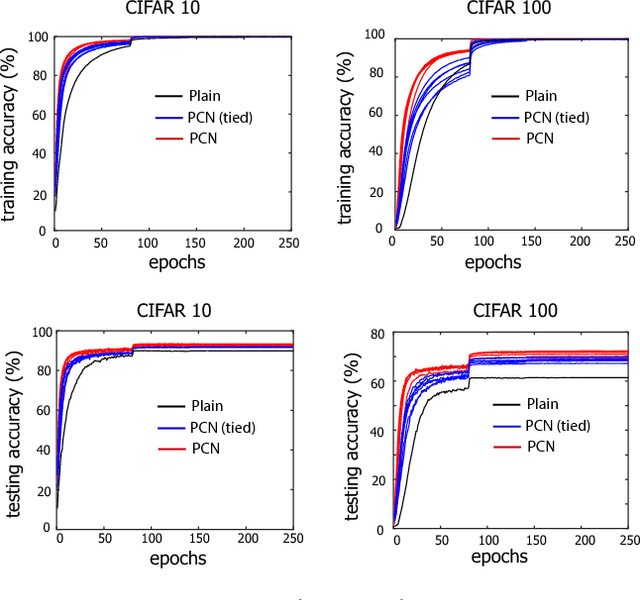
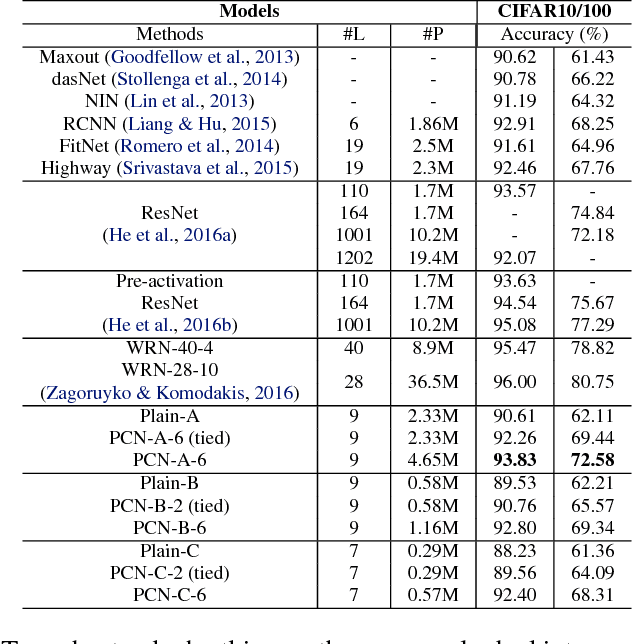
Based on the predictive coding theory in neuroscience, we designed a bi-directional and recurrent neural net, namely deep predictive coding networks (PCN). It has feedforward, feedback, and recurrent connections. Feedback connections from a higher layer carry the prediction of its lower-layer representation; feedforward connections carry the prediction errors to its higher-layer. Given image input, PCN runs recursive cycles of bottom-up and top-down computation to update its internal representations and reduce the difference between bottom-up input and top-down prediction at every layer. After multiple cycles of recursive updating, the representation is used for image classification. With benchmark data (CIFAR-10/100, SVHN, and MNIST), PCN was found to always outperform its feedforward-only counterpart: a model without any mechanism for recurrent dynamics. Its performance tended to improve given more cycles of computation over time. In short, PCN reuses a single architecture to recursively run bottom-up and top-down processes. As a dynamical system, PCN can be unfolded to a feedforward model that becomes deeper and deeper over time, while refining it representation towards more accurate and definitive object recognition.