 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA novel corrective-source term approach to modeling unknown physics in aluminum extraction process
Sep 22, 2022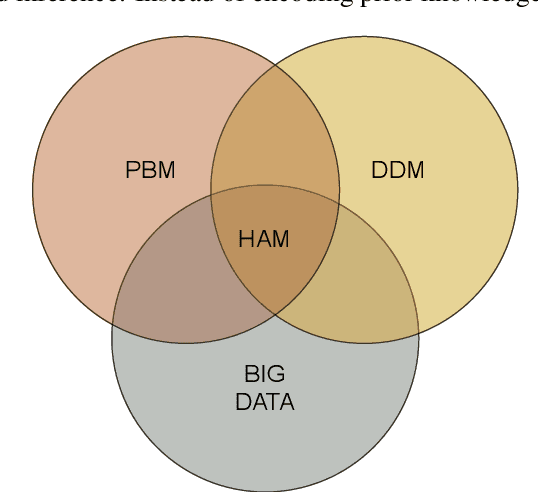
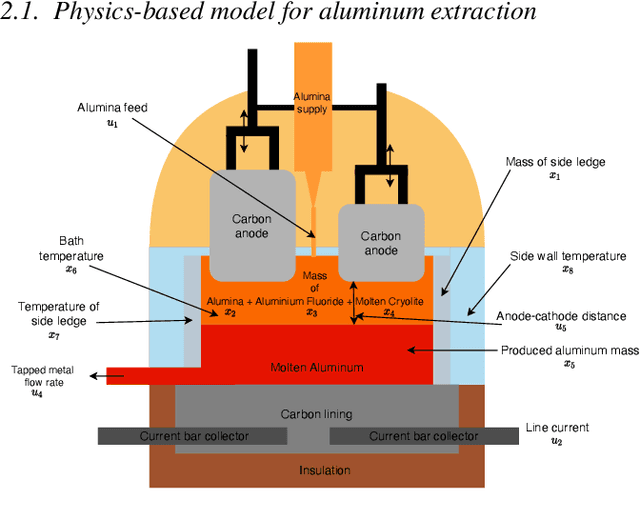
With the ever-increasing availability of data, there has been an explosion of interest in applying modern machine learning methods to fields such as modeling and control. However, despite the flexibility and surprising accuracy of such black-box models, it remains difficult to trust them. Recent efforts to combine the two approaches aim to develop flexible models that nonetheless generalize well; a paradigm we call Hybrid Analysis and modeling (HAM). In this work we investigate the Corrective Source Term Approach (CoSTA), which uses a data-driven model to correct a misspecified physics-based model. This enables us to develop models that make accurate predictions even when the underlying physics of the problem is not well understood. We apply CoSTA to model the Hall-H\'eroult process in an aluminum electrolysis cell. We demonstrate that the method improves both accuracy and predictive stability, yielding an overall more trustworthy model.
Physics guided neural networks for modelling of non-linear dynamics
May 13, 2022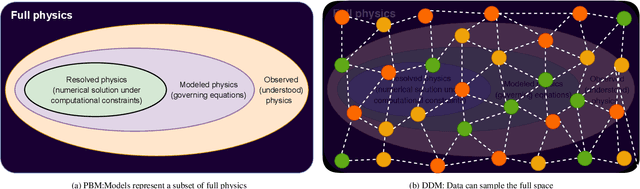
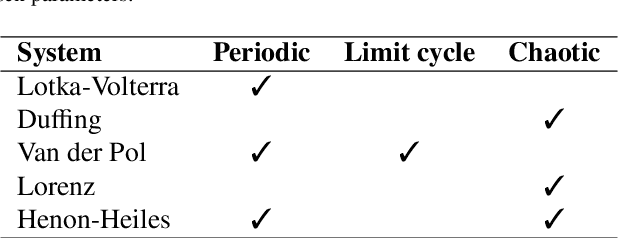
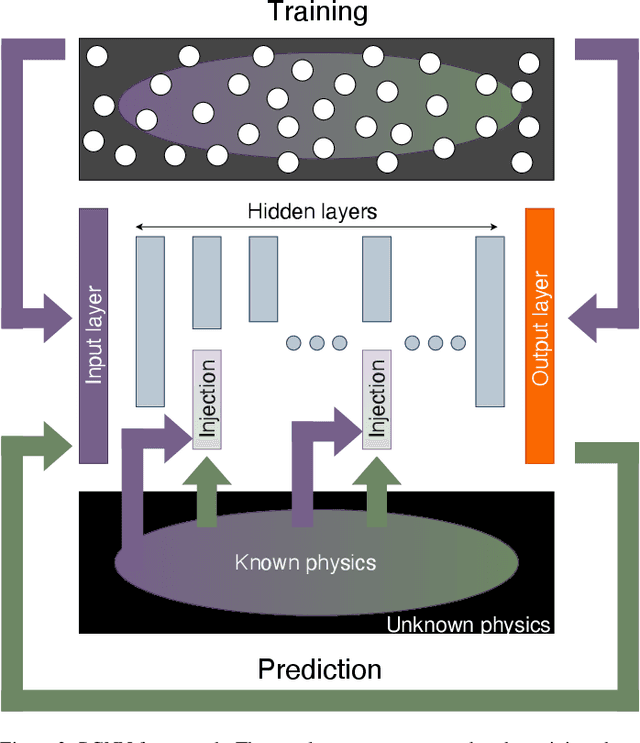

The success of the current wave of artificial intelligence can be partly attributed to deep neural networks, which have proven to be very effective in learning complex patterns from large datasets with minimal human intervention. However, it is difficult to train these models on complex dynamical systems from data alone due to their low data efficiency and sensitivity to hyperparameters and initialisation. This work demonstrates that injection of partially known information at an intermediate layer in a DNN can improve model accuracy, reduce model uncertainty, and yield improved convergence during the training. The value of these physics-guided neural networks has been demonstrated by learning the dynamics of a wide variety of nonlinear dynamical systems represented by five well-known equations in nonlinear systems theory: the Lotka-Volterra, Duffing, Van der Pol, Lorenz, and Henon-Heiles systems.
Taming an autonomous surface vehicle for path following and collision avoidance using deep reinforcement learning
Dec 18, 2019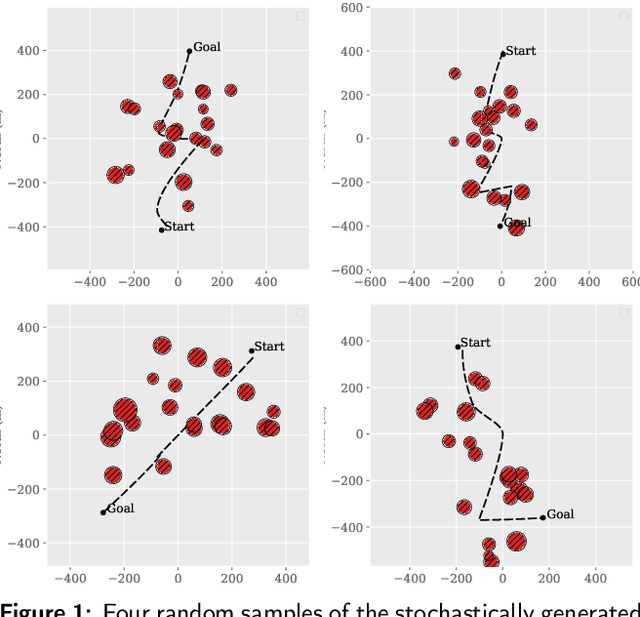

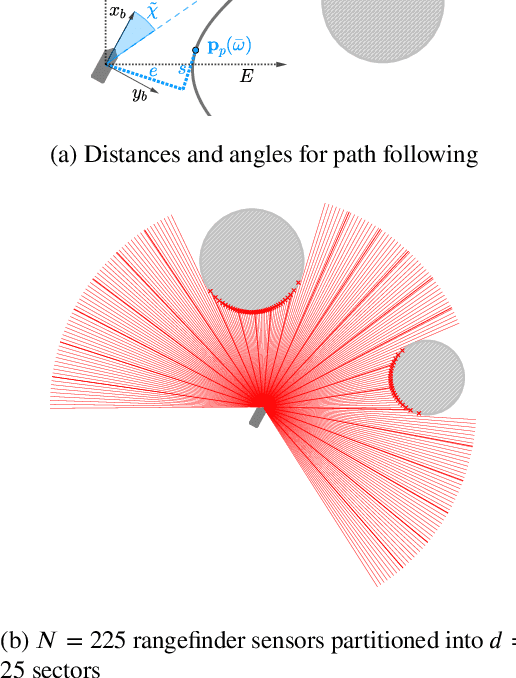
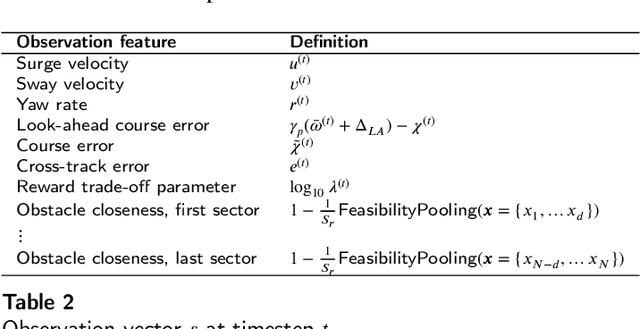
In this article, we explore the feasibility of applying proximal policy optimization, a state-of-the-art deep reinforcement learning algorithm for continuous control tasks, on the dual-objective problem of controlling an underactuated autonomous surface vehicle to follow an a priori known path while avoiding collisions with non-moving obstacles along the way. The artificial intelligent agent, which is equipped with multiple rangefinder sensors for obstacle detection, is trained and evaluated in a challenging, stochastically generated simulation environment based on the OpenAI gym python toolkit. Notably, the agent is provided with real-time insight into its own reward function, allowing it to dynamically adapt its guidance strategy. Depending on its strategy, which ranges from radical path-adherence to radical obstacle avoidance, the trained agent achieves an episodic success rate between 84 and 100%.
Dissecting Deep Neural Networks
Oct 09, 2019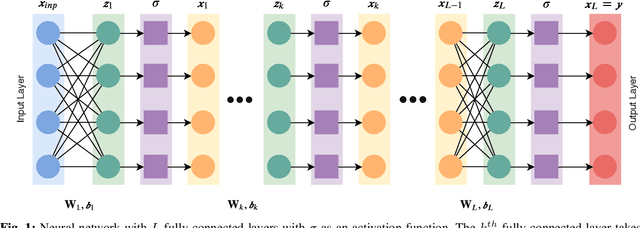
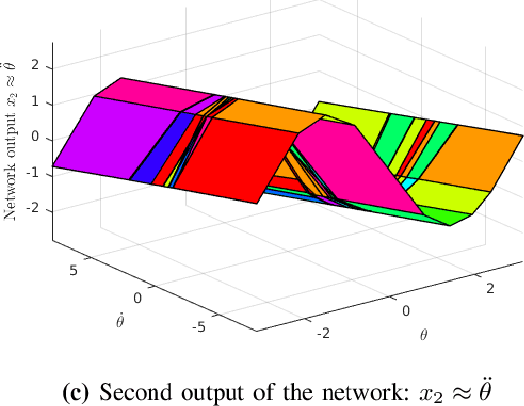
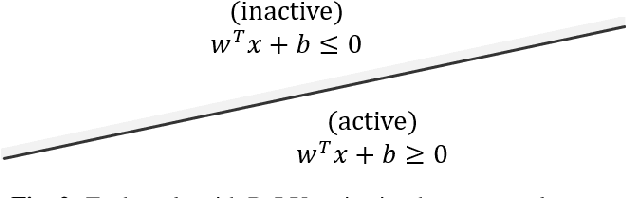

In exchange for large quantities of data and processing power, deep neural networks have yielded models that provide state of the art predication capabilities in many fields. However, a lack of strong guarantees on their behaviour have raised concerns over their use in safety-critical applications. A first step to understanding these networks is to develop alternate representations that allow for further analysis. It has been shown that neural networks with piecewise affine activation functions are themselves piecewise affine, with their domains consisting of a vast number of linear regions. So far, the research on this topic has focused on counting the number of linear regions, rather than obtaining explicit piecewise affine representations. This work presents a novel algorithm that can compute the piecewise affine form of any fully connected neural network with rectified linear unit activations.