 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics guided neural networks for modelling of non-linear dynamics
Paper and Code
May 13, 2022
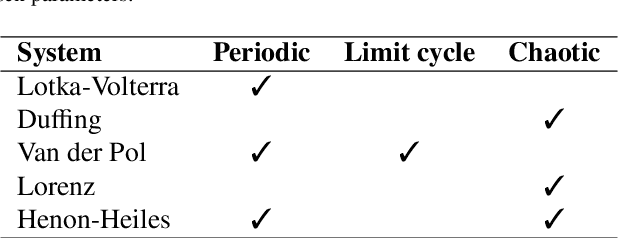
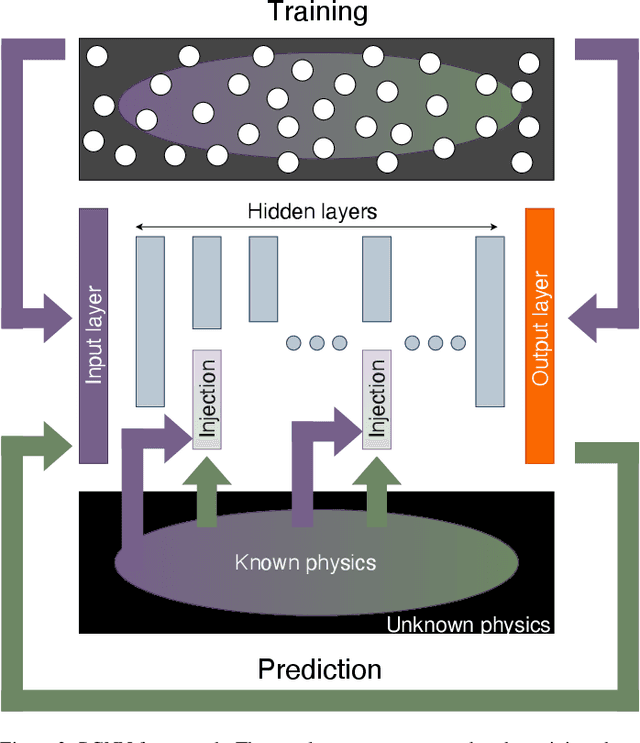

The success of the current wave of artificial intelligence can be partly attributed to deep neural networks, which have proven to be very effective in learning complex patterns from large datasets with minimal human intervention. However, it is difficult to train these models on complex dynamical systems from data alone due to their low data efficiency and sensitivity to hyperparameters and initialisation. This work demonstrates that injection of partially known information at an intermediate layer in a DNN can improve model accuracy, reduce model uncertainty, and yield improved convergence during the training. The value of these physics-guided neural networks has been demonstrated by learning the dynamics of a wide variety of nonlinear dynamical systems represented by five well-known equations in nonlinear systems theory: the Lotka-Volterra, Duffing, Van der Pol, Lorenz, and Henon-Heiles systems.