 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFourier Neural Operator based surrogates for $CO_2$ storage in realistic geologies
Mar 14, 2025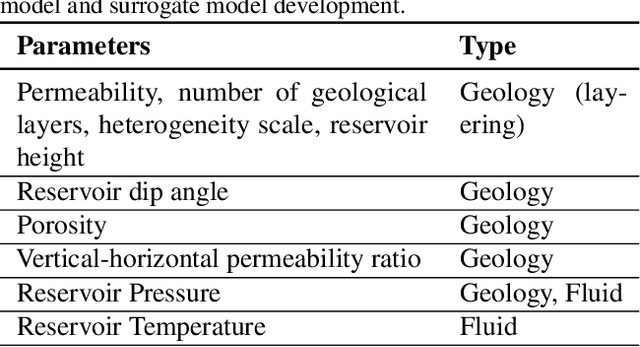
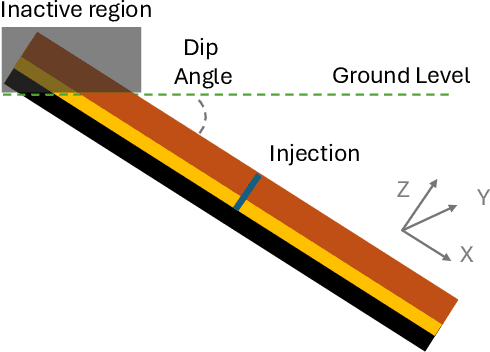
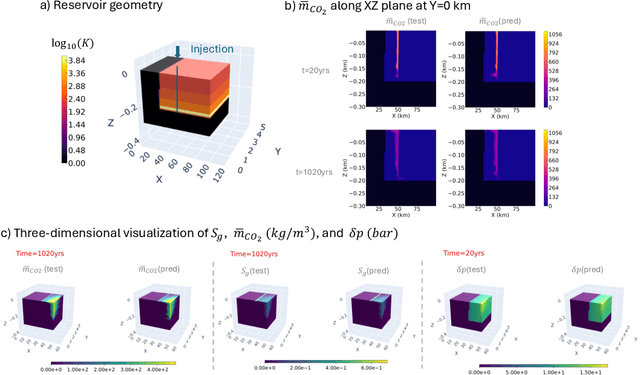
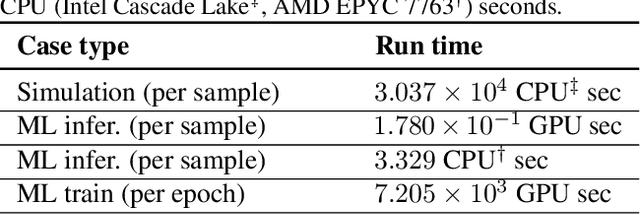
This study aims to develop surrogate models for accelerating decision making processes associated with carbon capture and storage (CCS) technologies. Selection of sub-surface $CO_2$ storage sites often necessitates expensive and involved simulations of $CO_2$ flow fields. Here, we develop a Fourier Neural Operator (FNO) based model for real-time, high-resolution simulation of $CO_2$ plume migration. The model is trained on a comprehensive dataset generated from realistic subsurface parameters and offers $O(10^5)$ computational acceleration with minimal sacrifice in prediction accuracy. We also explore super-resolution experiments to improve the computational cost of training the FNO based models. Additionally, we present various strategies for improving the reliability of predictions from the model, which is crucial while assessing actual geological sites. This novel framework, based on NVIDIA's Modulus library, will allow rapid screening of sites for CCS. The discussed workflows and strategies can be applied to other energy solutions like geothermal reservoir modeling and hydrogen storage. Our work scales scientific machine learning models to realistic 3D systems that are more consistent with real-life subsurface aquifers/reservoirs, paving the way for next-generation digital twins for subsurface CCS applications.
Prospects of federated machine learning in fluid dynamics
Aug 15, 2022
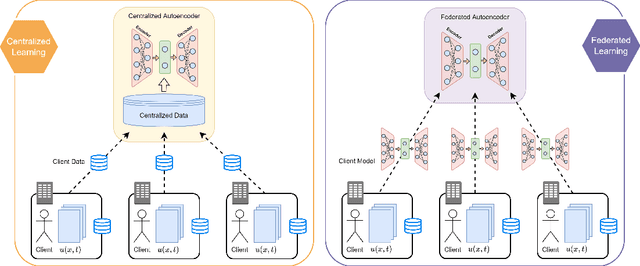
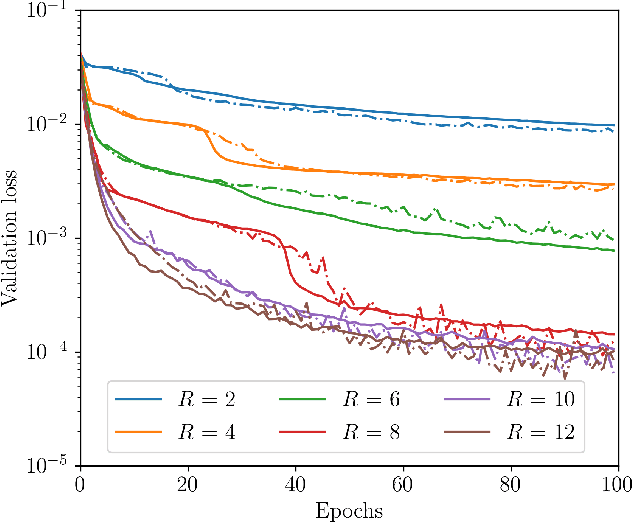

Physics-based models have been mainstream in fluid dynamics for developing predictive models. In recent years, machine learning has offered a renaissance to the fluid community due to the rapid developments in data science, processing units, neural network based technologies, and sensor adaptations. So far in many applications in fluid dynamics, machine learning approaches have been mostly focused on a standard process that requires centralizing the training data on a designated machine or in a data center. In this letter, we present a federated machine learning approach that enables localized clients to collaboratively learn an aggregated and shared predictive model while keeping all the training data on each edge device. We demonstrate the feasibility and prospects of such decentralized learning approach with an effort to forge a deep learning surrogate model for reconstructing spatiotemporal fields. Our results indicate that federated machine learning might be a viable tool for designing highly accurate predictive decentralized digital twins relevant to fluid dynamics.
Physics guided neural networks for modelling of non-linear dynamics
May 13, 2022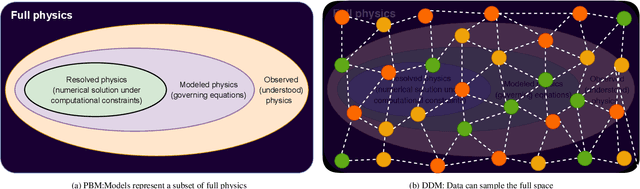
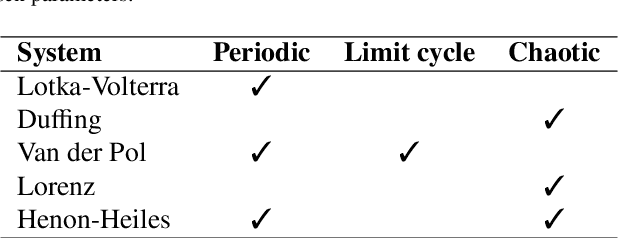
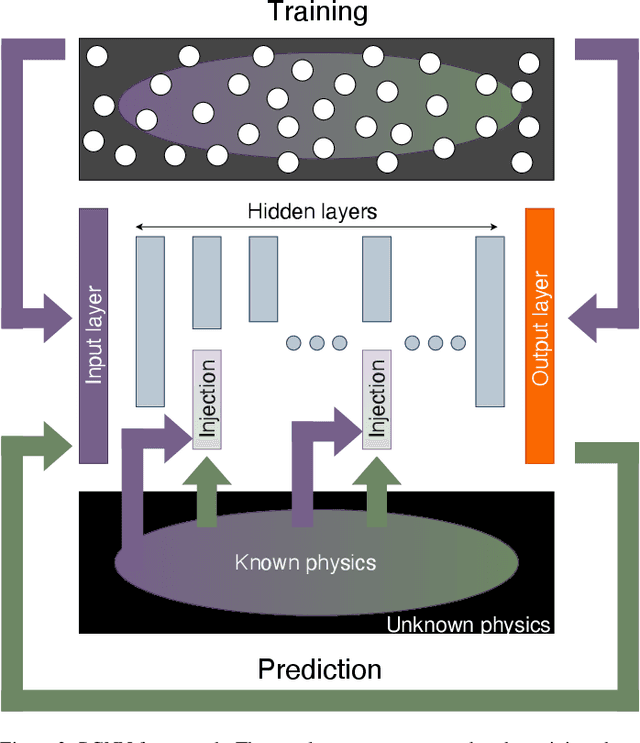

The success of the current wave of artificial intelligence can be partly attributed to deep neural networks, which have proven to be very effective in learning complex patterns from large datasets with minimal human intervention. However, it is difficult to train these models on complex dynamical systems from data alone due to their low data efficiency and sensitivity to hyperparameters and initialisation. This work demonstrates that injection of partially known information at an intermediate layer in a DNN can improve model accuracy, reduce model uncertainty, and yield improved convergence during the training. The value of these physics-guided neural networks has been demonstrated by learning the dynamics of a wide variety of nonlinear dynamical systems represented by five well-known equations in nonlinear systems theory: the Lotka-Volterra, Duffing, Van der Pol, Lorenz, and Henon-Heiles systems.
Multi-fidelity reinforcement learning framework for shape optimization
Feb 22, 2022
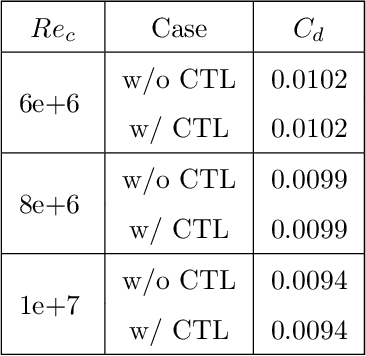

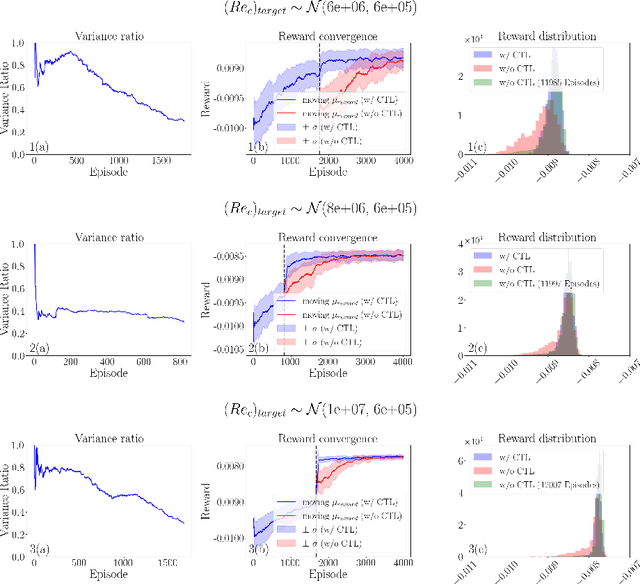
Deep reinforcement learning (DRL) is a promising outer-loop intelligence paradigm which can deploy problem solving strategies for complex tasks. Consequently, DRL has been utilized for several scientific applications, specifically in cases where classical optimization or control methods are limited. One key limitation of conventional DRL methods is their episode-hungry nature which proves to be a bottleneck for tasks which involve costly evaluations of a numerical forward model. In this article, we address this limitation of DRL by introducing a controlled transfer learning framework that leverages a multi-fidelity simulation setting. Our strategy is deployed for an airfoil shape optimization problem at high Reynolds numbers, where our framework can learn an optimal policy for generating efficient airfoil shapes by gathering knowledge from multi-fidelity environments and reduces computational costs by over 30\%. Furthermore, our formulation promotes policy exploration and generalization to new environments, thereby preventing over-fitting to data from solely one fidelity. Our results demonstrate this framework's applicability to other scientific DRL scenarios where multi-fidelity environments can be used for policy learning.
Physics guided machine learning using simplified theories
Dec 18, 2020

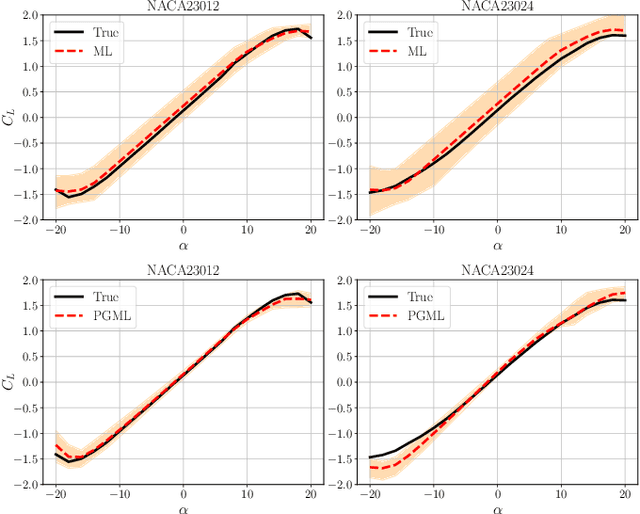
Recent applications of machine learning, in particular deep learning, motivate the need to address the generalizability of the statistical inference approaches in physical sciences. In this letter, we introduce a modular physics guided machine learning framework to improve the accuracy of such data-driven predictive engines. The chief idea in our approach is to augment the knowledge of the simplified theories with the underlying learning process. To emphasise on their physical importance, our architecture consists of adding certain features at intermediate layers rather than in the input layer. To demonstrate our approach, we select a canonical airfoil aerodynamic problem with the enhancement of the potential flow theory. We include features obtained by a panel method that can be computed efficiently for an unseen configuration in our training procedure. By addressing the generalizability concerns, our results suggest that the proposed feature enhancement approach can be effectively used in many scientific machine learning applications, especially for the systems where we can use a theoretical, empirical, or simplified model to guide the learning module.
A nudged hybrid analysis and modeling approach for realtime wake-vortex transport and decay prediction
Aug 05, 2020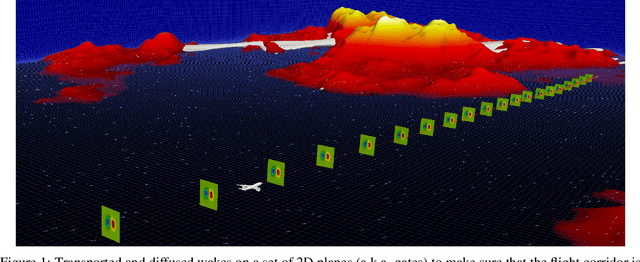
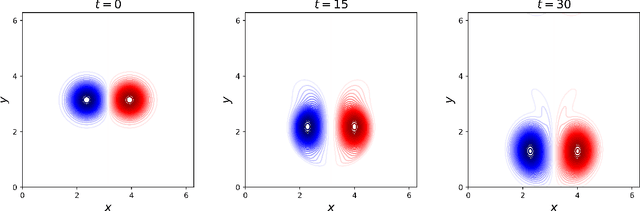
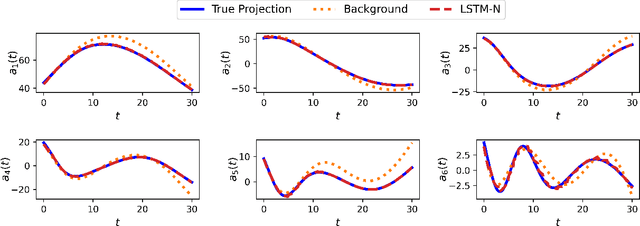
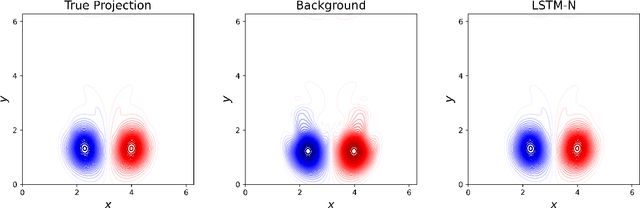
We put forth a long short-term memory (LSTM) nudging framework for the enhancement of reduced order models (ROMs) of fluid flows utilizing noisy measurements for air traffic improvements. Toward emerging applications of digital twins in aviation, the proposed approach allows for constructing a realtime predictive tool for wake-vortex transport and decay systems. We build on the fact that in realistic application, there are uncertainties in initial and boundary conditions, model parameters, as well as measurements. Moreover, conventional nonlinear ROMs based on Galerkin projection (GROMs) suffer from imperfection and solution instabilities, especially for advection-dominated flows with slow decay in the Kolmogorov width. In the presented LSTM nudging (LSTM-N) approach, we fuse forecasts from a combination of imperfect GROM and uncertain state estimates, with sparse Eulerian sensor measurements to provide more reliable predictions in a dynamical data assimilation framework. We illustrate our concept by solving a two-dimensional vorticity transport equation. We investigate the effects of measurements noise and state estimate uncertainty on the performance of the LSTM-N behavior. We also demonstrate that it can sufficiently handle different levels of temporal and spatial measurement sparsity, and offer a huge potential in developing next-generation digital twin technologies.