 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTaming an autonomous surface vehicle for path following and collision avoidance using deep reinforcement learning
Paper and Code
Dec 18, 2019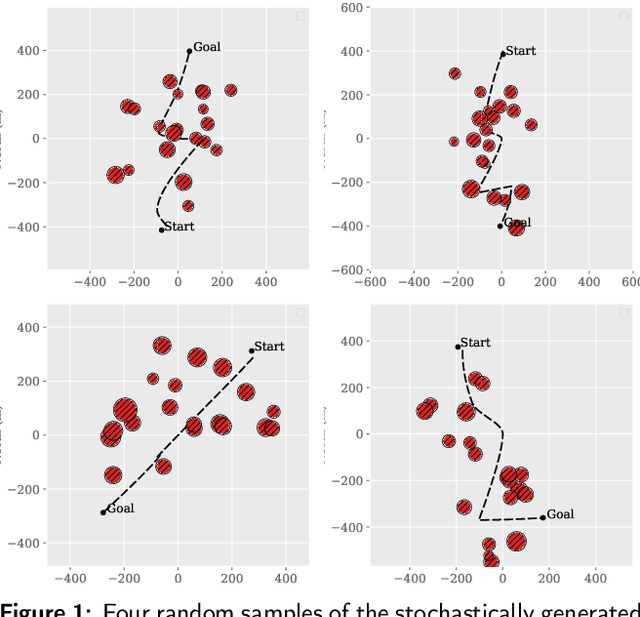

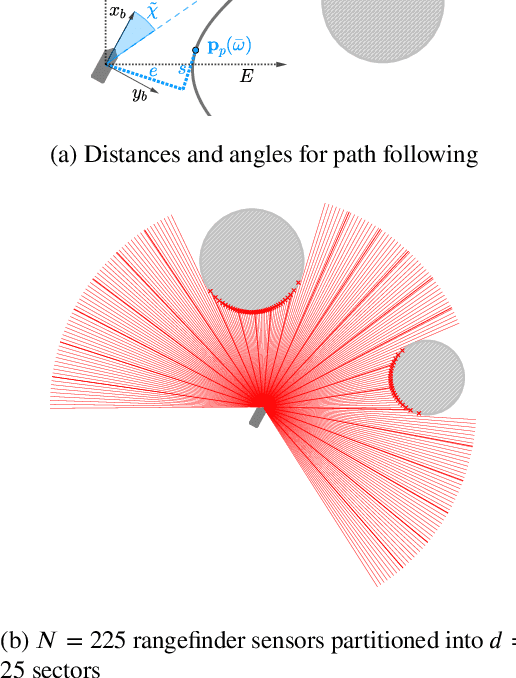
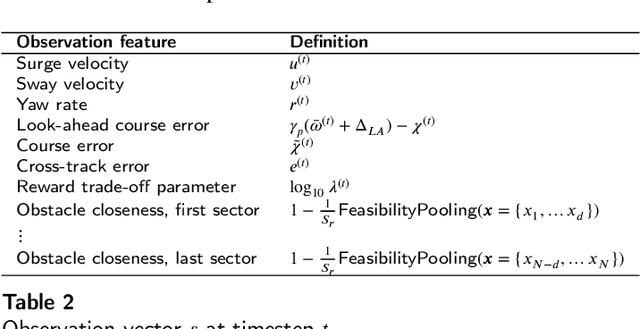
In this article, we explore the feasibility of applying proximal policy optimization, a state-of-the-art deep reinforcement learning algorithm for continuous control tasks, on the dual-objective problem of controlling an underactuated autonomous surface vehicle to follow an a priori known path while avoiding collisions with non-moving obstacles along the way. The artificial intelligent agent, which is equipped with multiple rangefinder sensors for obstacle detection, is trained and evaluated in a challenging, stochastically generated simulation environment based on the OpenAI gym python toolkit. Notably, the agent is provided with real-time insight into its own reward function, allowing it to dynamically adapt its guidance strategy. Depending on its strategy, which ranges from radical path-adherence to radical obstacle avoidance, the trained agent achieves an episodic success rate between 84 and 100%.