 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Effective AI Governance: A Review of Principles
May 29, 2025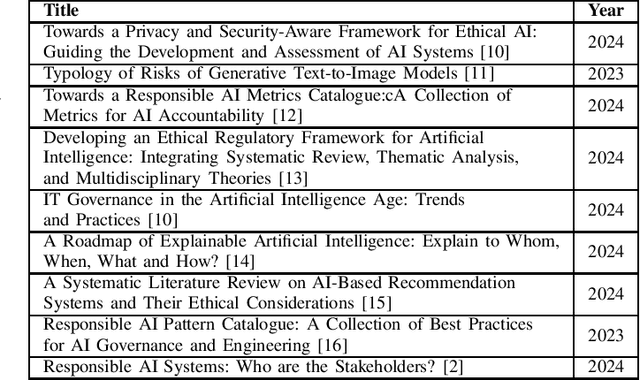
Artificial Intelligence (AI) governance is the practice of establishing frameworks, policies, and procedures to ensure the responsible, ethical, and safe development and deployment of AI systems. Although AI governance is a core pillar of Responsible AI, current literature still lacks synthesis across such governance frameworks and practices. Objective: To identify which frameworks, principles, mechanisms, and stakeholder roles are emphasized in secondary literature on AI governance. Method: We conducted a rapid tertiary review of nine peer-reviewed secondary studies from IEEE and ACM (20202024), using structured inclusion criteria and thematic semantic synthesis. Results: The most cited frameworks include the EU AI Act and NIST RMF; transparency and accountability are the most common principles. Few reviews detail actionable governance mechanisms or stakeholder strategies. Conclusion: The review consolidates key directions in AI governance and highlights gaps in empirical validation and inclusivity. Findings inform both academic inquiry and practical adoption in organizations.
Automatically Categorising GitHub Repositories by Application Domain
Jul 30, 2022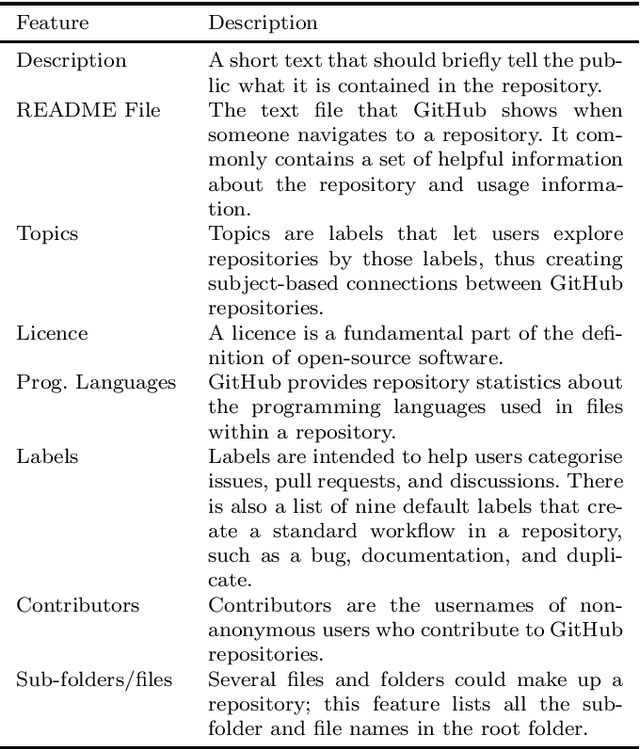
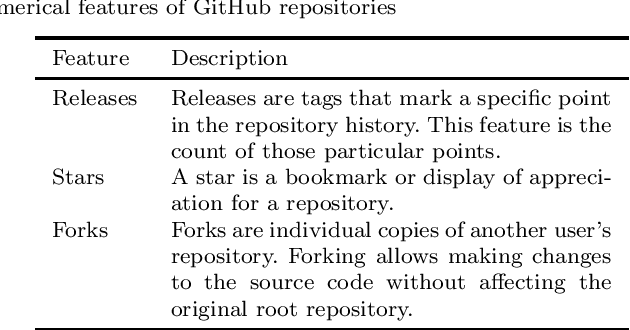
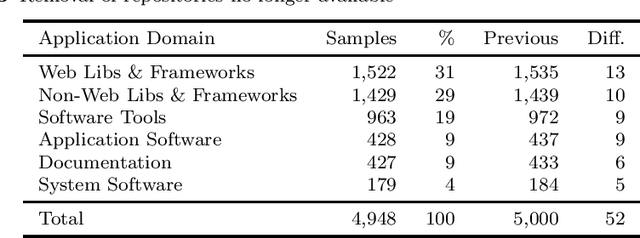

GitHub is the largest host of open source software on the Internet. This large, freely accessible database has attracted the attention of practitioners and researchers alike. But as GitHub's growth continues, it is becoming increasingly hard to navigate the plethora of repositories which span a wide range of domains. Past work has shown that taking the application domain into account is crucial for tasks such as predicting the popularity of a repository and reasoning about project quality. In this work, we build on a previously annotated dataset of 5,000 GitHub repositories to design an automated classifier for categorising repositories by their application domain. The classifier uses state-of-the-art natural language processing techniques and machine learning to learn from multiple data sources and catalogue repositories according to five application domains. We contribute with (1) an automated classifier that can assign popular repositories to each application domain with at least 70% precision, (2) an investigation of the approach's performance on less popular repositories, and (3) a practical application of this approach to answer how the adoption of software engineering practices differs across application domains. Our work aims to help the GitHub community identify repositories of interest and opens promising avenues for future work investigating differences between repositories from different application domains.
Mining Energy-Related Practices in Robotics Software
Mar 25, 2021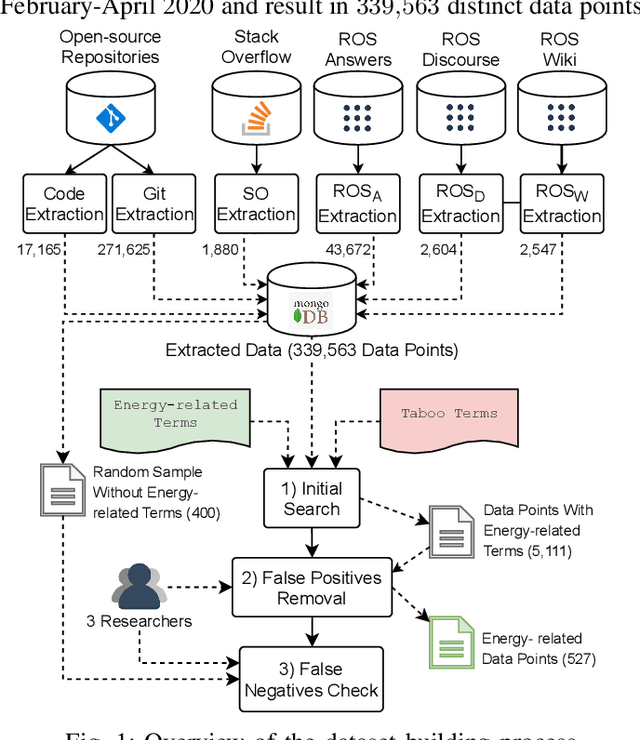
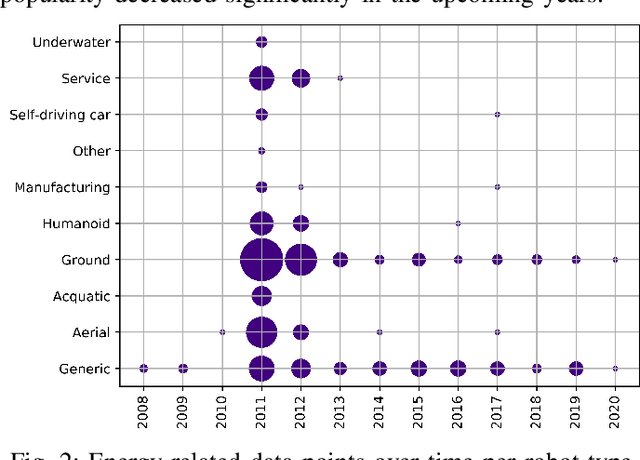
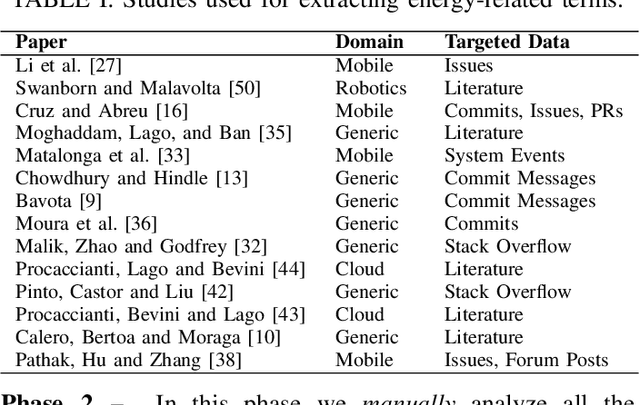
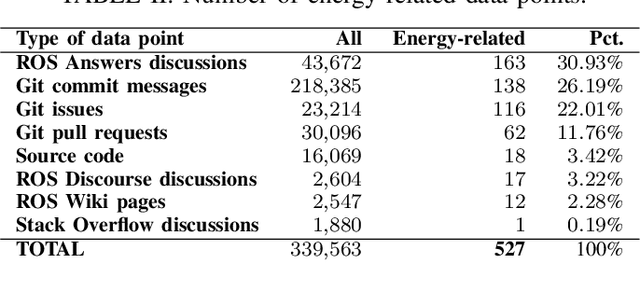
Robots are becoming more and more commonplace in many industry settings. This successful adoption can be partly attributed to (1) their increasingly affordable cost and (2) the possibility of developing intelligent, software-driven robots. Unfortunately, robotics software consumes significant amounts of energy. Moreover, robots are often battery-driven, meaning that even a small energy improvement can help reduce its energy footprint and increase its autonomy and user experience. In this paper, we study the Robot Operating System (ROS) ecosystem, the de-facto standard for developing and prototyping robotics software. We analyze 527 energy-related data points (including commits, pull-requests, and issues on ROS-related repositories, ROS-related questions on StackOverflow, ROS Discourse, ROS Answers, and the official ROS Wiki). Our results include a quantification of the interest of roboticists on software energy efficiency, 10 recurrent causes, and 14 solutions of energy-related issues, and their implied trade-offs with respect to other quality attributes. Those contributions support roboticists and researchers towards having energy-efficient software in future robotics projects.
* 11 pages