 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeanshift Shape Formation Control Using Discrete Mass Distribution
Feb 01, 2026The density-distribution method has recently become a promising paradigm owing to its adaptability to variations in swarm size. However, existing studies face practical challenges in achieving complex shape representation and decentralized implementation. This motivates us to develop a fully decentralized, distribution-based control strategy with the dual capability of forming complex shapes and adapting to swarm-size variations. Specifically, we first propose a discrete mass-distribution function defined over a set of sample points to model swarm formation. In contrast to the continuous density-distribution method, our model eliminates the requirement for defining continuous density functions-a task that is difficult for complex shapes. Second, we design a decentralized meanshift control law to coordinate the swarm's global distribution to fit the sample-point distribution by feeding back mass estimates. The mass estimates for all sample points are achieved by the robots in a decentralized manner via the designed mass estimator. It is shown that the mass estimates of the sample points can asymptotically converge to the true global values. To validate the proposed strategy, we conduct comprehensive simulations and real-world experiments to evaluate the efficiency of complex shape formation and adaptability to swarm-size variations.
Memory-Efficient 2D/3D Shape Assembly of Robot Swarms
Sep 30, 2025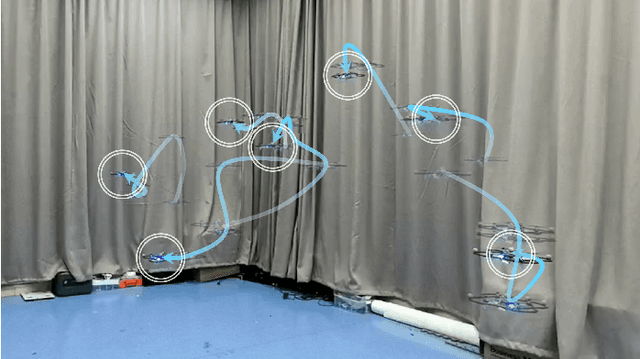
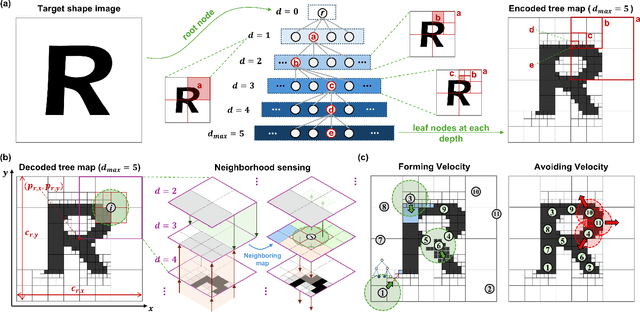
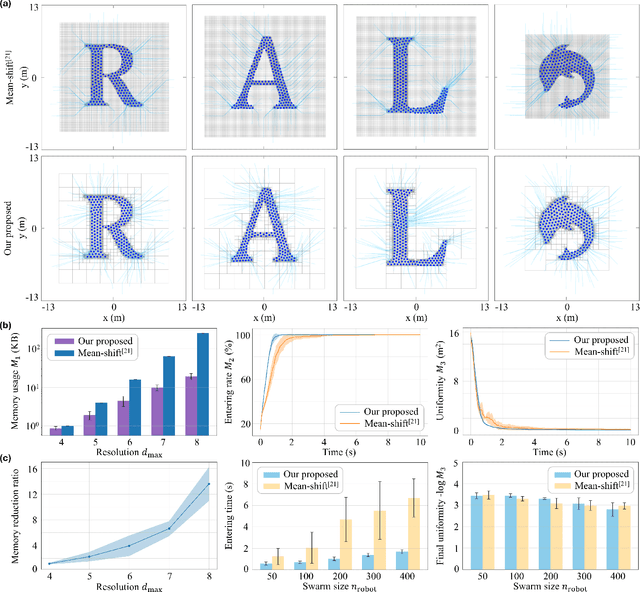
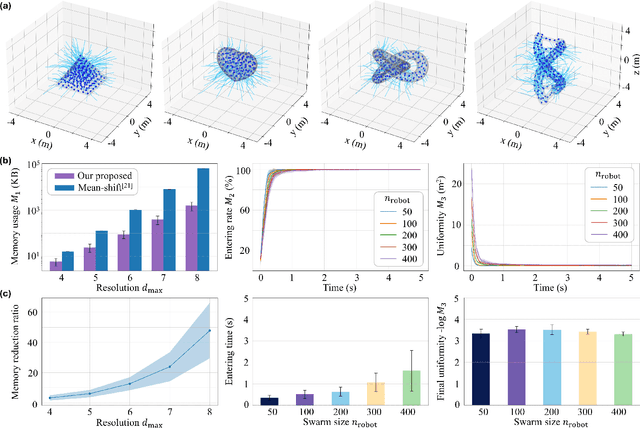
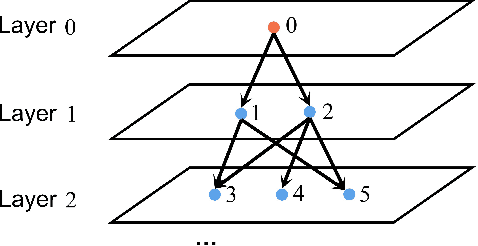
Mean-shift-based approaches have recently emerged as the most effective methods for robot swarm shape assembly tasks. These methods rely on image-based representations of target shapes to compute local density gradients and perform mean-shift exploration, which constitute their core mechanism. However, such image representations incur substantial memory overhead, which can become prohibitive for high-resolution or 3D shapes. To overcome this limitation, we propose a memory-efficient tree map representation that hierarchically encodes user-specified shapes and is applicable to both 2D and 3D scenarios. Building on this representation, we design a behavior-based distributed controller that enables assignment-free shape assembly. Comparative 2D and 3D simulations against a state-of-the-art mean-shift algorithm demonstrate one to two orders of magnitude lower memory usage and two to three times faster shape entry while maintaining comparable uniformity. Finally, we validate the framework through physical experiments with 6 to 7 UAVs, confirming its real-world practicality.
Relative Pose Estimation for Nonholonomic Robot Formation with UWB-IO Measurements
Nov 08, 2024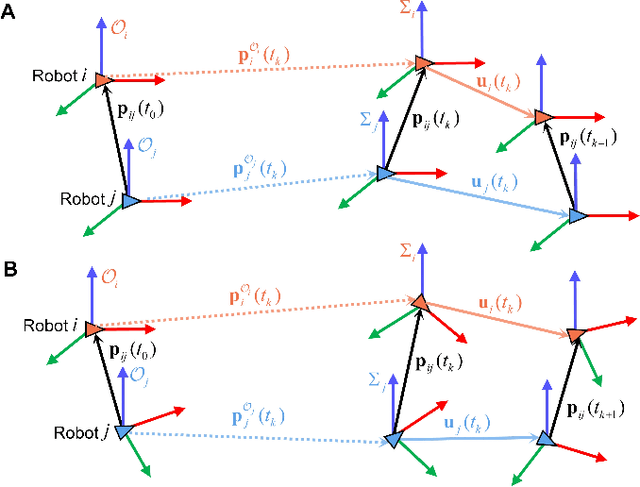
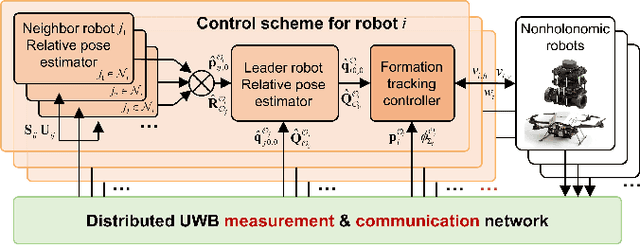
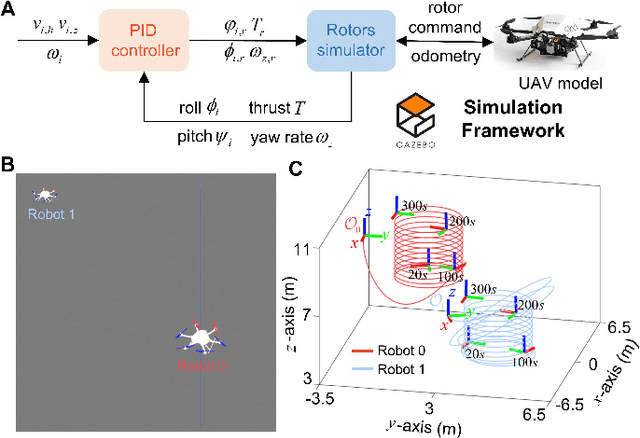
This article studies the problem of distributed formation control for multiple robots by using onboard ultra wide band (UWB) ranging and inertial odometer (IO) measurements. Although this problem has been widely studied, a fundamental limitation of most works is that they require each robot's pose and sensor measurements are expressed in a common reference frame. However, it is inapplicable for nonholonomic robot formations due to the practical difficulty of aligning IO measurements of individual robot in a common frame. To address this problem, firstly, a concurrent-learning based estimator is firstly proposed to achieve relative localization between neighboring robots in a local frame. Different from most relative localization methods in a global frame, both relative position and orientation in a local frame are estimated with only UWB ranging and IO measurements. Secondly, to deal with information loss caused by directed communication topology, a cooperative localization algorithm is introduced to estimate the relative pose to the leader robot. Thirdly, based on the theoretical results on relative pose estimation, a distributed formation tracking controller is proposed for nonholonomic robots. Both gazebo physical simulation and real-world experiments conducted on networked TurtleBot3 nonholonomic robots are provided to demonstrate the effectiveness of the proposed method.
Multi-Robot Pursuit in Parameterized Formation via Imitation Learning
Oct 31, 2024



This paper studies the problem of multi-robot pursuit of how to coordinate a group of defending robots to capture a faster attacker before it enters a protected area. Such operation for defending robots is challenging due to the unknown avoidance strategy and higher speed of the attacker, coupled with the limited communication capabilities of defenders. To solve this problem, we propose a parameterized formation controller that allows defending robots to adapt their formation shape using five adjustable parameters. Moreover, we develop an imitation-learning based approach integrated with model predictive control to optimize these shape parameters. We make full use of these two techniques to enhance the capture capabilities of defending robots through ongoing training. Both simulation and experiment are provided to verify the effectiveness and robustness of our proposed controller. Simulation results show that defending robots can rapidly learn an effective strategy for capturing the attacker, and moreover the learned strategy remains effective across varying numbers of defenders. Experiment results on real robot platforms further validated these findings.
Distributed Formation Shape Control of Identity-less Robot Swarms
Oct 31, 2024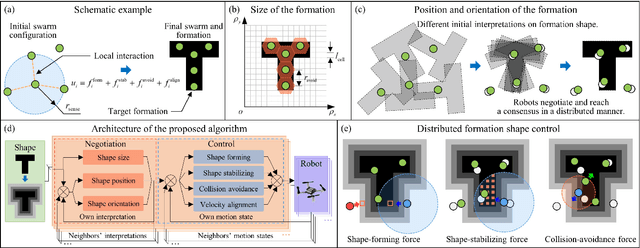
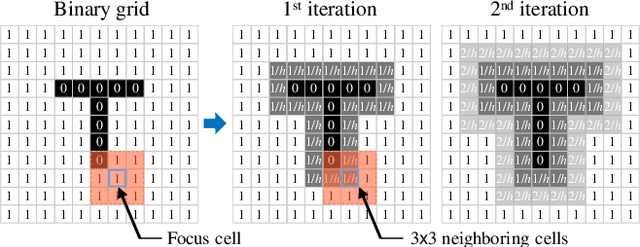
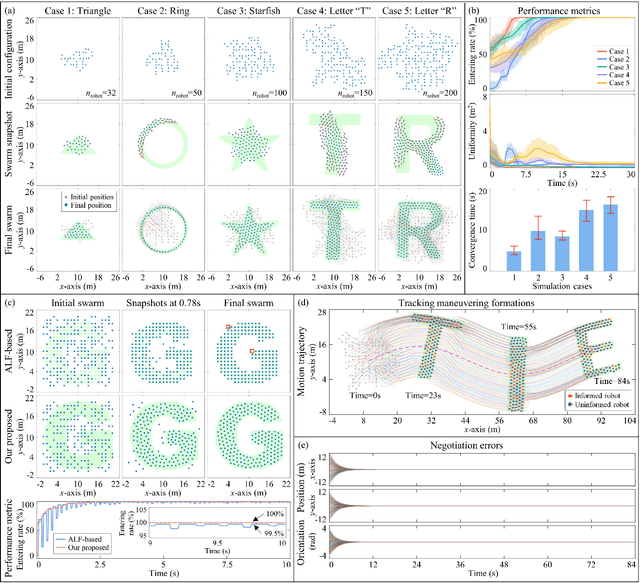
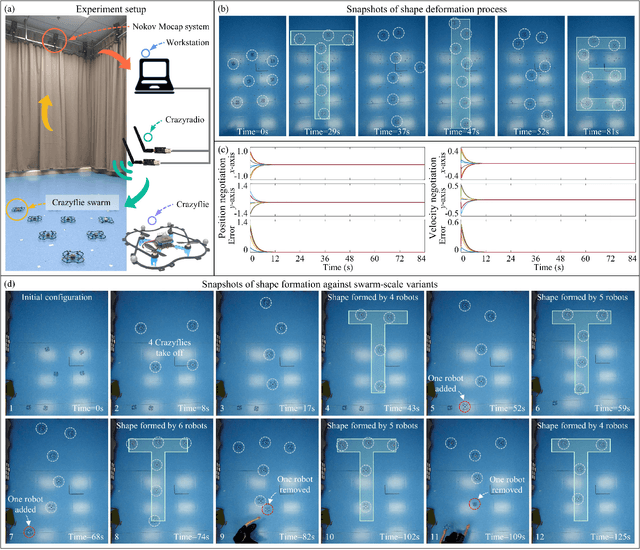
Different from most of the formation strategies where robots require unique labels to identify topological neighbors to satisfy the predefined shape constraints, we here study the problem of identity-less distributed shape formation in homogeneous swarms, which is rarely studied in the literature. The absence of identities creates a unique challenge: how to design appropriate target formations and local behaviors that are suitable for identity-less formation shape control. To address this challenge, we propose the following novel results. First, to avoid using unique identities, we propose a dynamic formation description method and solve the formation consensus of robots in a locally distributed manner. Second, to handle identity-less distributed formations, we propose a fully distributed control law for homogeneous swarms based on locally sensed information. While the existing methods are applicable to simple cases where the target formation is stationary, ours can tackle more general maneuvering formations such as translation, rotation, or even shape deformation. Both numerical simulation and flight experiment are presented to verify the effectiveness and robustness of our proposed formation strategy.
Concurrent-Learning Based Relative Localization in Shape Formation of Robot Swarms
Oct 08, 2024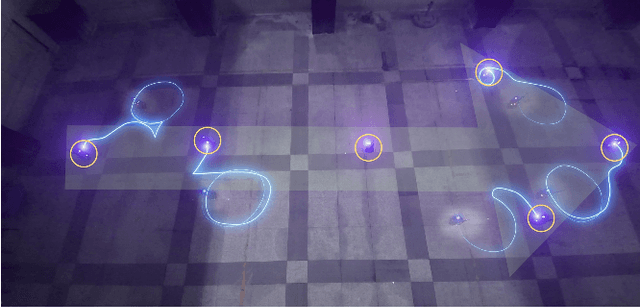
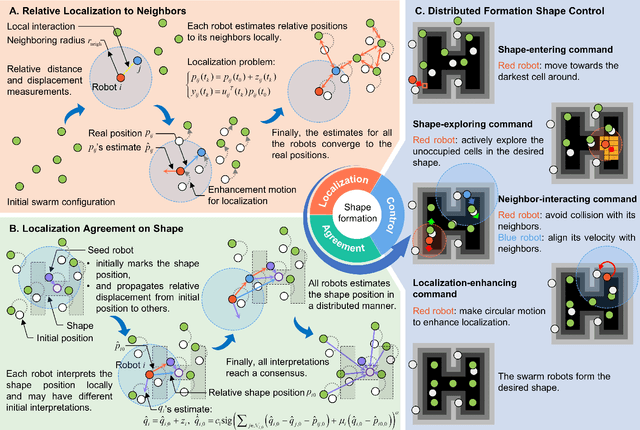
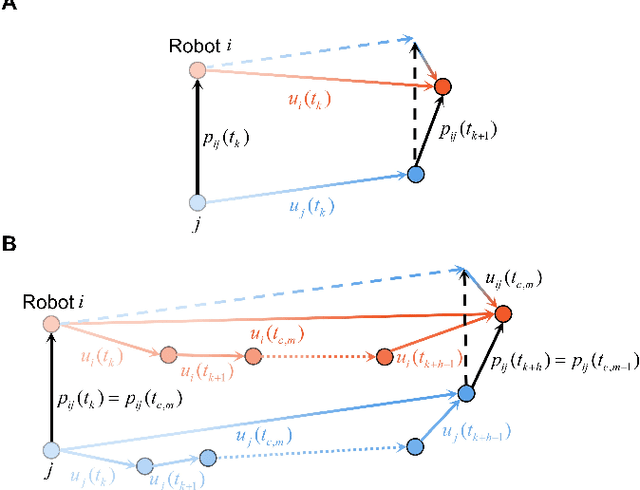
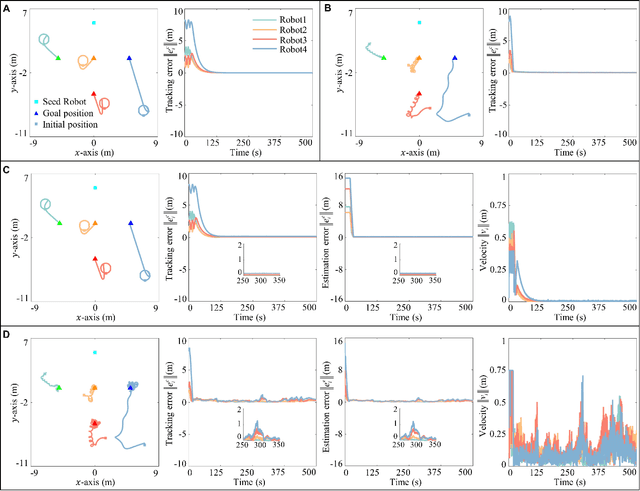
In this paper, we address the shape formation problem for massive robot swarms in environments where external localization systems are unavailable. Achieving this task effectively with solely onboard measurements is still scarcely explored and faces some practical challenges. To solve this challenging problem, we propose the following novel results. Firstly, to estimate the relative positions among neighboring robots, a concurrent-learning based estimator is proposed. It relaxes the persistent excitation condition required in the classical ones such as least-square estimator. Secondly, we introduce a finite-time agreement protocol to determine the shape location. This is achieved by estimating the relative position between each robot and a randomly assigned seed robot. The initial position of the seed one marks the shape location. Thirdly, based on the theoretical results of the relative localization, a novel behavior-based control strategy is devised. This strategy not only enables adaptive shape formation of large group of robots but also enhances the observability of inter-robot relative localization. Numerical simulation results are provided to verify the performance of our proposed strategy compared to the state-of-the-art ones. Additionally, outdoor experiments on real robots further demonstrate the practical effectiveness and robustness of our methods.