 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Formation Shape Control of Identity-less Robot Swarms
Paper and Code
Oct 31, 2024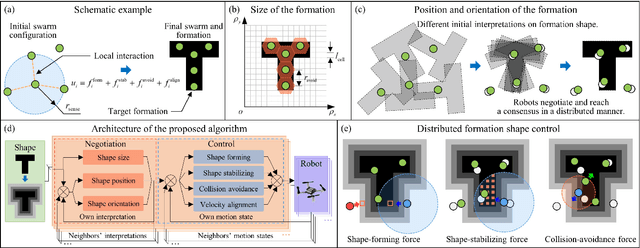
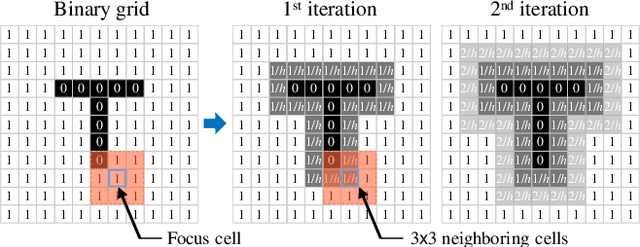
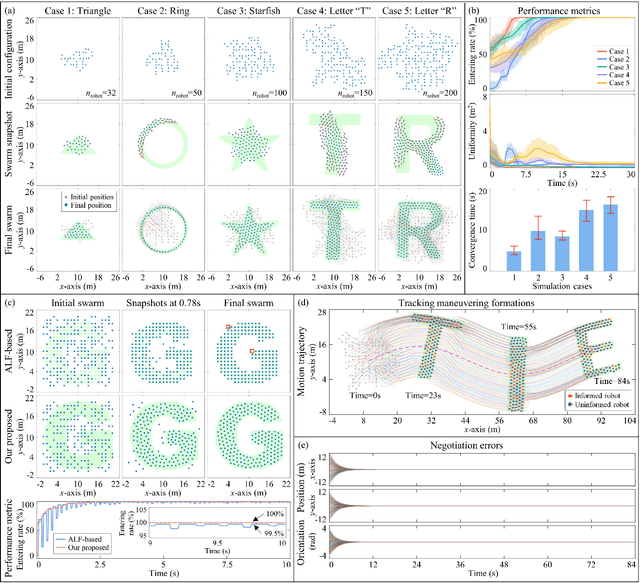
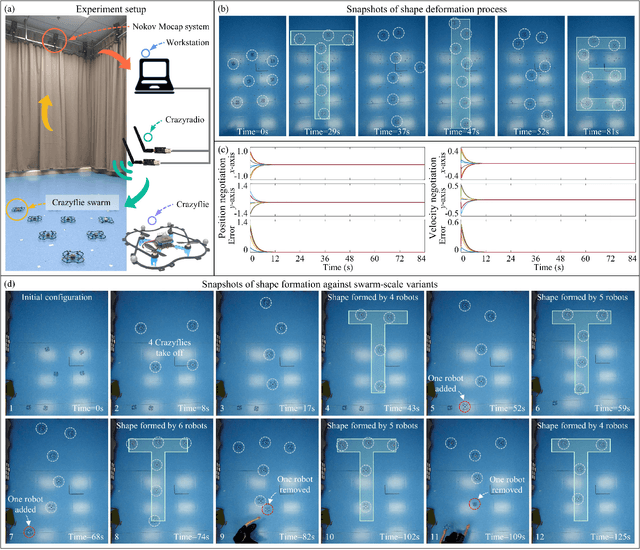
Different from most of the formation strategies where robots require unique labels to identify topological neighbors to satisfy the predefined shape constraints, we here study the problem of identity-less distributed shape formation in homogeneous swarms, which is rarely studied in the literature. The absence of identities creates a unique challenge: how to design appropriate target formations and local behaviors that are suitable for identity-less formation shape control. To address this challenge, we propose the following novel results. First, to avoid using unique identities, we propose a dynamic formation description method and solve the formation consensus of robots in a locally distributed manner. Second, to handle identity-less distributed formations, we propose a fully distributed control law for homogeneous swarms based on locally sensed information. While the existing methods are applicable to simple cases where the target formation is stationary, ours can tackle more general maneuvering formations such as translation, rotation, or even shape deformation. Both numerical simulation and flight experiment are presented to verify the effectiveness and robustness of our proposed formation strategy.