 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysically Accurate Rigid-Body Dynamics in Particle-Based Simulation
Mar 15, 2026Robotics demands simulation that can reason about the diversity of real-world physical interactions, from rigid to deformable objects and fluids. Current simulators address this by stitching together multiple subsolvers for different material types, resulting in a compositional architecture that complicates physical reasoning. Particle-based simulators offer a compelling alternative, representing all materials through a single unified formulation that enables seamless cross-material interactions. Among particle-based simulators, position-based dynamics (PBD) is a popular solver known for its computational efficiency and visual plausibility. However, its lack of physical accuracy has limited its adoption in robotics. To leverage the benefits of particle-based solvers while meeting the physical fidelity demands of robotics, we introduce PBD-R, a revised PBD formulation that enforces physically accurate rigid-body dynamics through a novel momentum-conservation constraint and a modified velocity update. Additionally, we introduce a solver-agnostic benchmark with analytical solutions to evaluate physical accuracy. Using this benchmark, we show that PBD-R significantly outperforms PBD and achieves competitive accuracy with MuJoCo while requiring less computation.
Exploring How Non-Prehensile Manipulation Expands Capability in Robots Experiencing Multi-Joint Failure
Oct 01, 2024



This work explores non-prehensile manipulation (NPM) and whole-body interaction as strategies for enabling robotic manipulators to conduct manipulation tasks despite experiencing locked multi-joint (LMJ) failures. LMJs are critical system faults where two or more joints become inoperable; they impose constraints on the robot's configuration and control spaces, consequently limiting the capability and reach of a prehensile-only approach. This approach involves three components: i) modeling the failure-constrained workspace of the robot, ii) generating a kinodynamic map of NPM actions within this workspace, and iii) a manipulation action planner that uses a sim-in-the-loop approach to select the best actions to take from the kinodynamic map. The experimental evaluation shows that our approach can increase the failure-constrained reachable area in LMJ cases by 79%. Further, it demonstrates the ability to complete real-world manipulation with up to 88.9% success when the end-effector is unusable and up to 100% success when it is usable.
Solving Service Robot Tasks: UT Austin Villa@Home 2019 Team Report
Sep 14, 2019
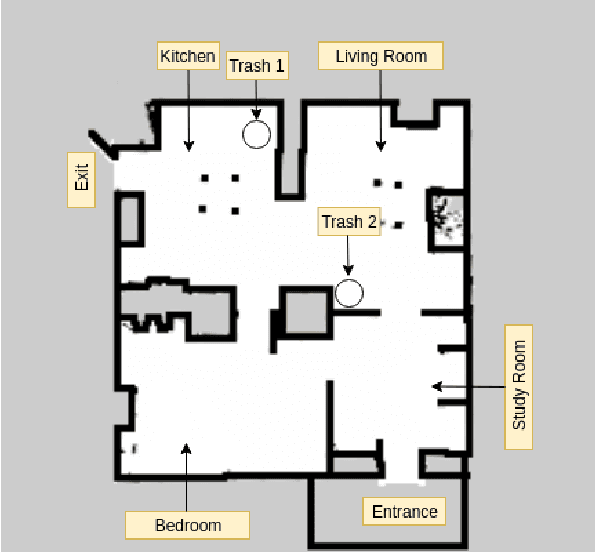
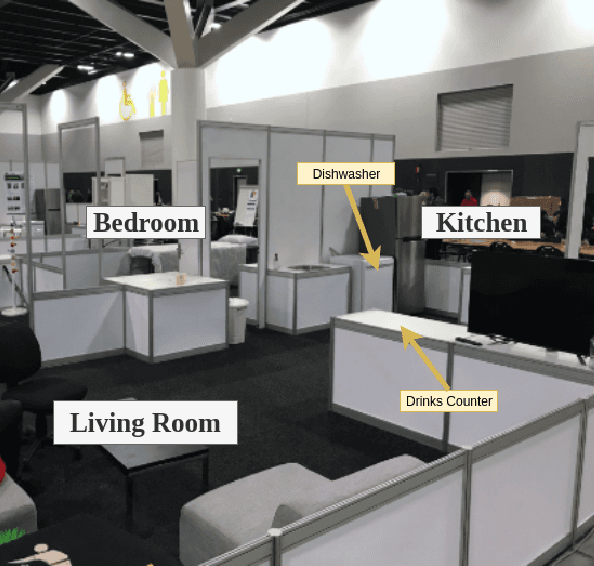
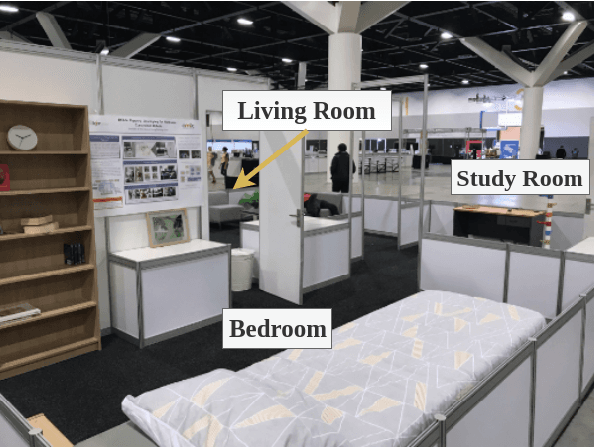
RoboCup@Home is an international robotics competition based on domestic tasks requiring autonomous capabilities pertaining to a large variety of AI technologies. Research challenges are motivated by these tasks both at the level of individual technologies and the integration of subsystems into a fully functional, robustly autonomous system. We describe the progress made by the UT Austin Villa 2019 RoboCup@Home team which represents a significant step forward in AI-based HRI due to the breadth of tasks accomplished within a unified system. Presented are the competition tasks, component technologies they rely on, our initial approaches both to the components and their integration, and directions for future research.