 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoving On, Even When You're Broken: Fail-Active Trajectory Generation via Diffusion Policies Conditioned on Embodiment and Task
Feb 02, 2026Robot failure is detrimental and disruptive, often requiring human intervention to recover. Maintaining safe operation under impairment to achieve task completion, i.e. fail-active operation, is our target. Focusing on actuation failures, we introduce DEFT, a diffusion-based trajectory generator conditioned on the robot's current embodiment and task constraints. DEFT generalizes across failure types, supports constrained and unconstrained motions, and enables task completion under arbitrary failure. We evaluated DEFT in both simulation and real-world scenarios using a 7-DoF robotic arm. In simulation over thousands of joint-failure cases across multiple tasks, DEFT outperformed the baseline by up to 2 times. On failures unseen during training, it continued to outperform the baseline, indicating robust generalization in simulation. Further, we performed real-world evaluations on two multi-step tasks, drawer manipulation and whiteboard erasing. These experiments demonstrated DEFT succeeding on tasks where classical methods failed. Our results show that DEFT achieves fail-active manipulation across arbitrary failure configurations and real-world deployments.
Exploring How Non-Prehensile Manipulation Expands Capability in Robots Experiencing Multi-Joint Failure
Oct 01, 2024



This work explores non-prehensile manipulation (NPM) and whole-body interaction as strategies for enabling robotic manipulators to conduct manipulation tasks despite experiencing locked multi-joint (LMJ) failures. LMJs are critical system faults where two or more joints become inoperable; they impose constraints on the robot's configuration and control spaces, consequently limiting the capability and reach of a prehensile-only approach. This approach involves three components: i) modeling the failure-constrained workspace of the robot, ii) generating a kinodynamic map of NPM actions within this workspace, and iii) a manipulation action planner that uses a sim-in-the-loop approach to select the best actions to take from the kinodynamic map. The experimental evaluation shows that our approach can increase the failure-constrained reachable area in LMJ cases by 79%. Further, it demonstrates the ability to complete real-world manipulation with up to 88.9% success when the end-effector is unusable and up to 100% success when it is usable.
Towards Super-Nominal Payload Handling: Inverse Dynamics Analysis for Multi-Skill Robotic Manipulation
Sep 27, 2024Motion planning for articulated robots has traditionally been governed by algorithms that operate within manufacturer-defined payload limits. Our empirical analysis of the Franka Emika Panda robot demonstrates that this approach unnecessarily restricts the robot's dynamically-reachable task space. These results establish an expanded operational envelope for such robots, showing that they can handle payloads of more than twice their rated capacity. Additionally, our preliminary findings indicate that integrating non-prehensile motion primitives with grasping-based manipulation has the potential to further increase the success rates of manipulation tasks involving payloads exceeding nominal limits.
Clutter-Aware Spill-Free Liquid Transport via Learned Dynamics
Aug 01, 2024



In this work, we present a novel algorithm to perform spill-free handling of open-top liquid-filled containers that operates in cluttered environments. By allowing liquid-filled containers to be tilted at higher angles and enabling motion along all axes of end-effector orientation, our work extends the reachable space and enhances maneuverability around obstacles, broadening the range of feasible scenarios. Our key contributions include: i) generating spill-free paths through the use of RRT* with an informed sampler that leverages container properties to avoid spill-inducing states (such as an upside-down container), ii) parameterizing the resulting path to generate spill-free trajectories through the implementation of a time parameterization algorithm, coupled with a transformer-based machine-learning model capable of classifying trajectories as spill-free or not. We validate our approach in real-world, obstacle-rich task settings using containers of various shapes and fill levels and demonstrate an extended solution space that is at least 3x larger than an existing approach.
The Virtues of Laziness: Multi-Query Kinodynamic Motion Planning with Lazy Methods
Mar 12, 2024



In this work, we introduce LazyBoE, a multi-query method for kinodynamic motion planning with forward propagation. This algorithm allows for the simultaneous exploration of a robot's state and control spaces, thereby enabling a wider suite of dynamic tasks in real-world applications. Our contributions are three-fold: i) a method for discretizing the state and control spaces to amortize planning times across multiple queries; ii) lazy approaches to collision checking and propagation of control sequences that decrease the cost of physics-based simulation; and iii) LazyBoE, a robust kinodynamic planner that leverages these two contributions to produce dynamically-feasible trajectories. The proposed framework not only reduces planning time but also increases success rate in comparison to previous approaches.
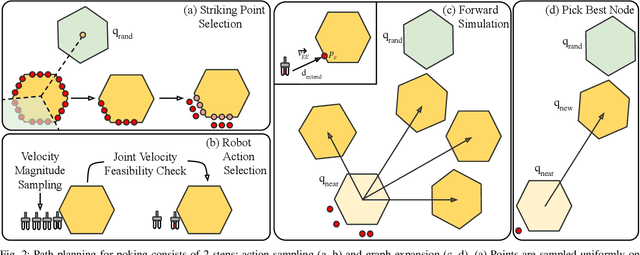
PokeRRT: A Kinodynamic Planning Approach for Poking Manipulation
Feb 09, 2022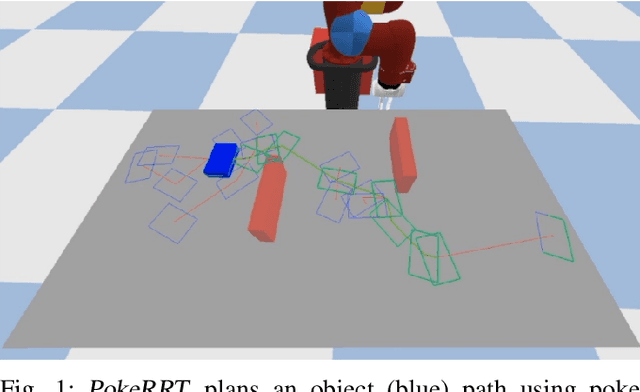

This work introduces PokeRRT, a novel motion planning algorithm that demonstrates poking as an effective non-prehensile manipulation skill to enable fast manipulation of objects and increase the size of a robot's reachable workspace. Our qualitative and quantitative results demonstrate the advantages of poking over pushing and grasping in planning object trajectories through uncluttered and cluttered environments.
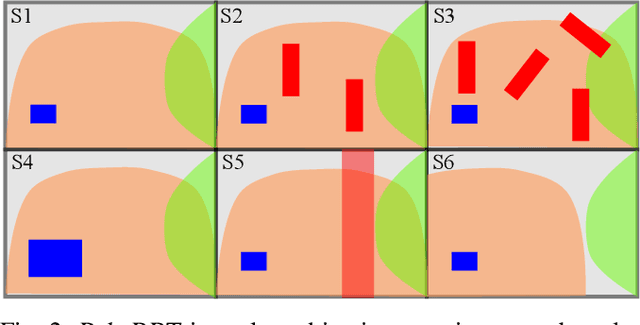
PokeRRT: Poking as a Skill and Failure Recovery Tactic for Planar Non-Prehensile Manipulation
Jan 31, 2022

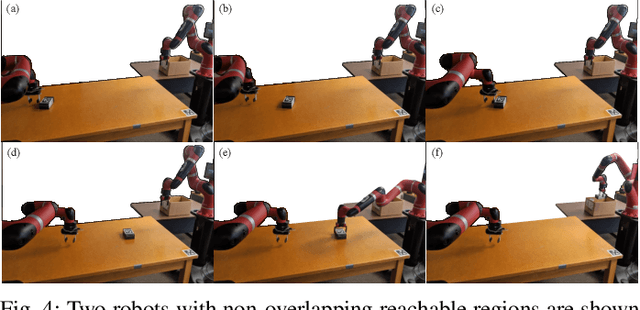
In this work, we introduce PokeRRT, a novel motion planning algorithm that demonstrates poking as an effective non-prehensile manipulation skill to enable fast manipulation of objects and increase the size of a robot's reachable workspace. We showcase poking as a failure recovery tactic used synergistically with pick-and-place for resiliency in cases where pick-and-place initially fails or is unachievable. Our experiments demonstrate the efficiency of the proposed framework in planning object trajectories using poking manipulation in uncluttered and cluttered environments. In addition to quantitatively and qualitatively demonstrating the adaptability of PokeRRT to different scenarios in both simulation and real-world settings, our results show the advantages of poking over pushing and grasping in terms of success rate and task time.