Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePokeRRT: A Kinodynamic Planning Approach for Poking Manipulation
Paper and Code
Feb 09, 2022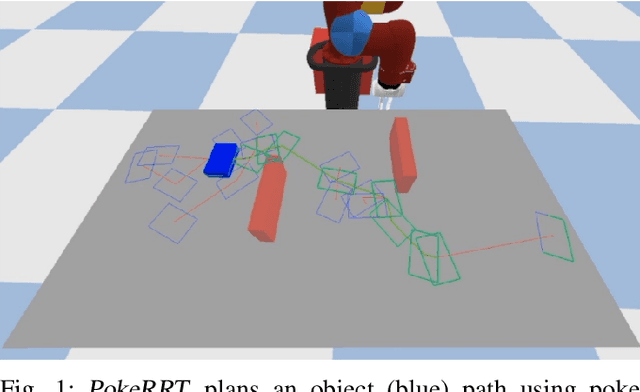
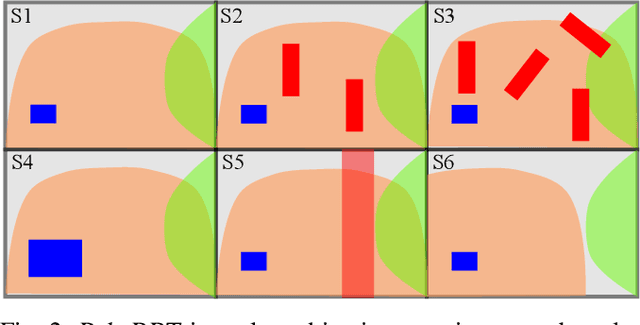

This work introduces PokeRRT, a novel motion planning algorithm that demonstrates poking as an effective non-prehensile manipulation skill to enable fast manipulation of objects and increase the size of a robot's reachable workspace. Our qualitative and quantitative results demonstrate the advantages of poking over pushing and grasping in planning object trajectories through uncluttered and cluttered environments.
* Published at the IROS 2021 Workshop on Impact-Aware Robotics
View paper on