 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFull-Body Dynamic Safety for Robot Manipulators: 3D Poisson Safety Functions for CBF-Based Safety Filters
Apr 23, 2026Collision avoidance for robotic manipulators requires enforcing full-body safety constraints in high-dimensional configuration spaces. Control Barrier Function (CBF) based safety filters have proven effective in enabling safe behaviors, but enforcing the high number of constraints needed for safe manipulation leads to theoretic and computational challenges. This work presents a framework for full-body collision avoidance for manipulators in dynamic environments by leveraging 3D Poisson Safety Functions (PSFs). In particular, given environmental occupancy data, we sample the manipulator surface at a prescribed resolution and shrink free space via a Pontryagin difference according to this resolution. On this buffered domain, we synthesize a globally smooth CBF by solving Poisson's equation, yielding a single safety function for the entire environment. This safety function, evaluated at each sampled point, yields task-space CBF constraints enforced by a real-time safety filter via a multi-constraint quadratic program. We prove that keeping the sample points safe in the buffered region guarantees collision avoidance for the entire continuous robot surface. The framework is validated on a 7-degree-of-freedom manipulator in dynamic environments.
Safe-SAGE: Social-Semantic Adaptive Guidance for Safe Engagement through Laplace-Modulated Poisson Safety Functions
Mar 05, 2026Traditional safety-critical control methods, such as control barrier functions, suffer from semantic blindness, exhibiting the same behavior around obstacles regardless of contextual significance. This limitation leads to the uniform treatment of all obstacles, despite their differing semantic meanings. We present Safe-SAGE (Social-Semantic Adaptive Guidance for Safe Engagement), a unified framework that bridges the gap between high-level semantic understanding and low-level safety-critical control through a Poisson safety function (PSF) modulated using a Laplace guidance field. Our approach perceives the environment by fusing multi-sensor point clouds with vision-based instance segmentation and persistent object tracking to maintain up-to-date semantics beyond the camera's field of view. A multi-layer safety filter is then used to modulate system inputs to achieve safe navigation using this semantic understanding of the environment. This safety filter consists of both a model predictive control layer and a control barrier function layer. Both layers utilize the PSF and flux modulation of the guidance field to introduce varying levels of conservatism and multi-agent passing norms for different obstacles in the environment. Our framework enables legged robots to navigate semantically rich, dynamic environments with context-dependent safety margins while maintaining rigorous safety guarantees.
Layered Safety: Enhancing Autonomous Collision Avoidance via Multistage CBF Safety Filters
Feb 27, 2026This paper presents a general end-to-end framework for constructing robust and reliable layered safety filters that can be leveraged to perform dynamic collision avoidance over a broad range of applications using only local perception data. Given a robot-centric point cloud, we begin by constructing an occupancy map which is used to synthesize a Poisson safety function (PSF). The resultant PSF is employed as a control barrier function (CBF) within two distinct safety filtering stages. In the first stage, we propose a predictive safety filter to compute optimal safe trajectories based on nominal potentially-unsafe commands. The resultant short-term plans are constrained to satisfy the CBF condition along a finite prediction horizon. In the second stage, instantaneous velocity commands are further refined by a real-time CBF-based safety filter and tracked by the full-order low-level robot controller. Assuming accurate tracking of velocity commands, we obtain formal guarantees of safety for the full-order system. We validate the optimality and robustness of our multistage architecture, in comparison to traditional single-stage safety filters, via a detailed Pareto analysis. We further demonstrate the effectiveness and generality of our collision avoidance methodology on multiple legged robot platforms across a variety of real-world dynamic scenarios.
Risk-Aware Safety Filters with Poisson Safety Functions and Laplace Guidance Fields
Oct 29, 2025Robotic systems navigating in real-world settings require a semantic understanding of their environment to properly determine safe actions. This work aims to develop the mathematical underpinnings of such a representation -- specifically, the goal is to develop safety filters that are risk-aware. To this end, we take a two step approach: encoding an understanding of the environment via Poisson's equation, and associated risk via Laplace guidance fields. That is, we first solve a Dirichlet problem for Poisson's equation to generate a safety function that encodes system safety as its 0-superlevel set. We then separately solve a Dirichlet problem for Laplace's equation to synthesize a safe \textit{guidance field} that encodes variable levels of caution around obstacles -- by enforcing a tunable flux boundary condition. The safety function and guidance fields are then combined to define a safety constraint and used to synthesize a risk-aware safety filter which, given a semantic understanding of an environment with associated risk levels of environmental features, guarantees safety while prioritizing avoidance of higher risk obstacles. We demonstrate this method in simulation and discuss how \textit{a priori} understandings of obstacle risk can be directly incorporated into the safety filter to generate safe behaviors that are risk-aware.
Dynamic Safety in Complex Environments: Synthesizing Safety Filters with Poisson's Equation
May 11, 2025



Synthesizing safe sets for robotic systems operating in complex and dynamically changing environments is a challenging problem. Solving this problem can enable the construction of safety filters that guarantee safe control actions -- most notably by employing Control Barrier Functions (CBFs). This paper presents an algorithm for generating safe sets from perception data by leveraging elliptic partial differential equations, specifically Poisson's equation. Given a local occupancy map, we solve Poisson's equation subject to Dirichlet boundary conditions, with a novel forcing function. Specifically, we design a smooth guidance vector field, which encodes gradient information required for safety. The result is a variational problem for which the unique minimizer -- a safety function -- characterizes the safe set. After establishing our theoretical result, we illustrate how safety functions can be used in CBF-based safety filtering. The real-time utility of our synthesis method is highlighted through hardware demonstrations on quadruped and humanoid robots navigating dynamically changing obstacle-filled environments.
Characterizing Smooth Safety Filters via the Implicit Function Theorem
Sep 22, 2023Optimization-based safety filters, such as control barrier function (CBF) based quadratic programs (QPs), have demonstrated success in controlling autonomous systems to achieve complex goals. These CBF-QPs can be shown to be continuous, but are generally not smooth, let alone continuously differentiable. In this paper, we present a general characterization of smooth safety filters -- smooth controllers that guarantee safety in a minimally invasive fashion -- based on the Implicit Function Theorem. This characterization leads to families of smooth universal formulas for safety-critical controllers that quantify the conservatism of the resulting safety filter, the utility of which is demonstrated through illustrative examples.
Multi-Adversarial Safety Analysis for Autonomous Vehicles
Dec 29, 2021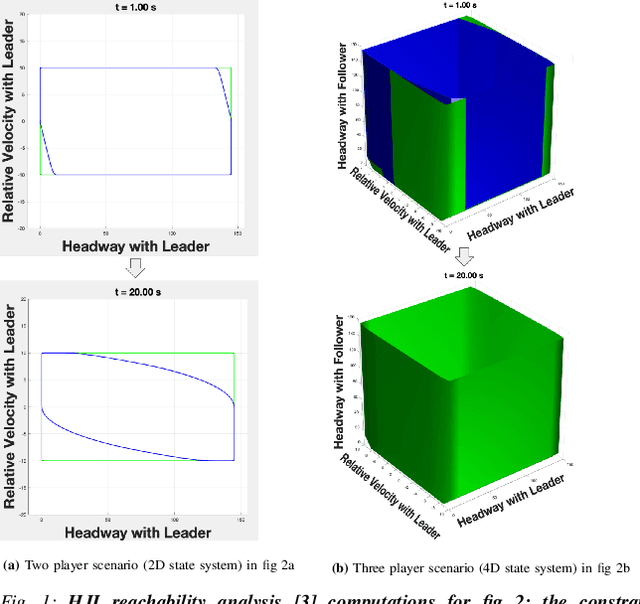
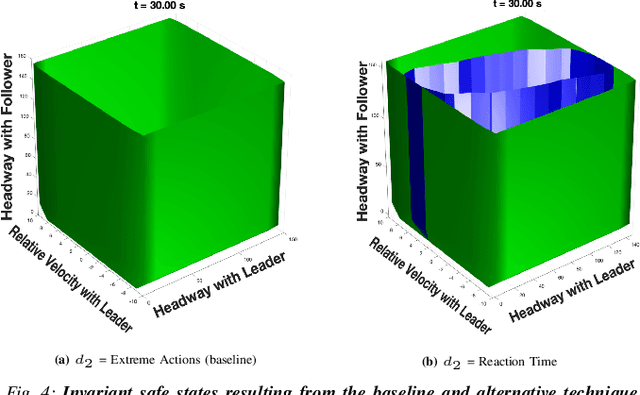
This work in progress considers reachability-based safety analysis in the domain of autonomous driving in multi-agent systems. We formulate the safety problem for a car following scenario as a differential game and study how different modelling strategies yield very different behaviors regardless of the validity of the strategies in other scenarios. Given the nature of real-life driving scenarios, we propose a modeling strategy in our formulation that accounts for subtle interactions between agents, and compare its Hamiltonian results to other baselines. Our formulation encourages reduction of conservativeness in Hamilton-Jacobi safety analysis to provide better safety guarantees during navigation.