Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Adversarial Safety Analysis for Autonomous Vehicles
Paper and Code
Dec 29, 2021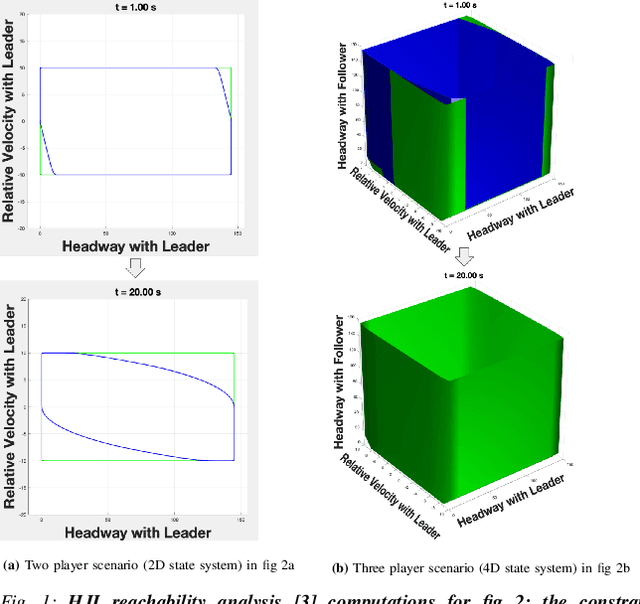
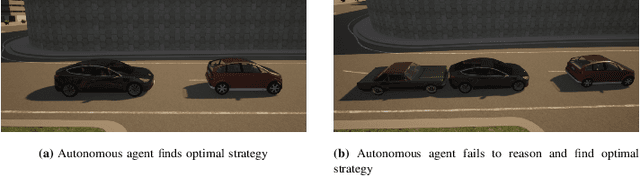
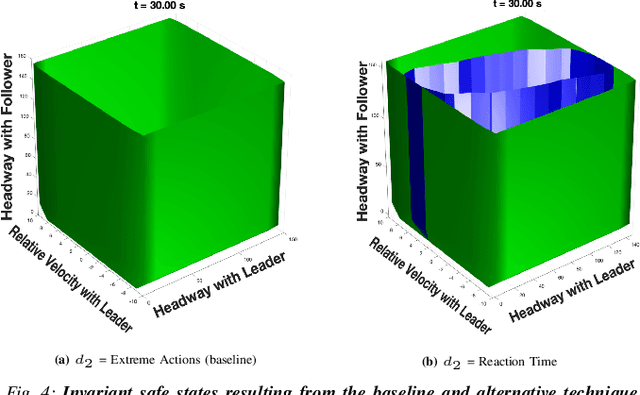
This work in progress considers reachability-based safety analysis in the domain of autonomous driving in multi-agent systems. We formulate the safety problem for a car following scenario as a differential game and study how different modelling strategies yield very different behaviors regardless of the validity of the strategies in other scenarios. Given the nature of real-life driving scenarios, we propose a modeling strategy in our formulation that accounts for subtle interactions between agents, and compare its Hamiltonian results to other baselines. Our formulation encourages reduction of conservativeness in Hamilton-Jacobi safety analysis to provide better safety guarantees during navigation.
* 2 pages. 4 figures. RSS 2020 Workshop Robust Autonomy
View paper on
 OpenReview
OpenReview