 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Class of Axis-Angle Attitude Control Laws for Rotational Systems
Dec 22, 2025



We introduce a new class of attitude control laws for rotational systems, which generalizes the use of the Euler axis-angle representation beyond quaternion-based formulations. Using basic Lyapunov's stability theory and the notion of extended $K_{\infty}$ functions, we developed a method for determining and enforcing the global asymptotic stability of the single fixed point of the resulting closed-loop (CL) scheme. In contrast with traditional quaternion-based methods, the proposed generalized axis-angle approach enables greater flexibility in the design of the control law, which is of great utility when employed in combination with a switching scheme whose transition state depends on the angular velocity of the controlled rotational system. Through simulation and real-time experimental results, we demonstrate the effectiveness of the proposed approach. According to the recorded data, in the execution of high-speed tumble-recovery maneuvers, the new method consistently achieves shorter stabilization times and requires lower control effort relative to those corresponding to the quaternion-based and geometric-control methods used as benchmarks.
Risk-Aware Safety Filters with Poisson Safety Functions and Laplace Guidance Fields
Oct 29, 2025Robotic systems navigating in real-world settings require a semantic understanding of their environment to properly determine safe actions. This work aims to develop the mathematical underpinnings of such a representation -- specifically, the goal is to develop safety filters that are risk-aware. To this end, we take a two step approach: encoding an understanding of the environment via Poisson's equation, and associated risk via Laplace guidance fields. That is, we first solve a Dirichlet problem for Poisson's equation to generate a safety function that encodes system safety as its 0-superlevel set. We then separately solve a Dirichlet problem for Laplace's equation to synthesize a safe \textit{guidance field} that encodes variable levels of caution around obstacles -- by enforcing a tunable flux boundary condition. The safety function and guidance fields are then combined to define a safety constraint and used to synthesize a risk-aware safety filter which, given a semantic understanding of an environment with associated risk levels of environmental features, guarantees safety while prioritizing avoidance of higher risk obstacles. We demonstrate this method in simulation and discuss how \textit{a priori} understandings of obstacle risk can be directly incorporated into the safety filter to generate safe behaviors that are risk-aware.
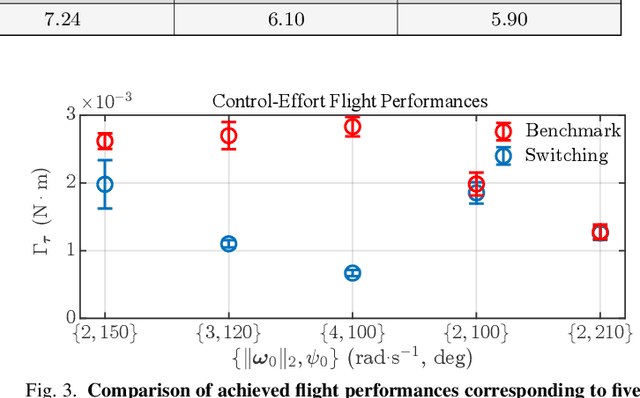
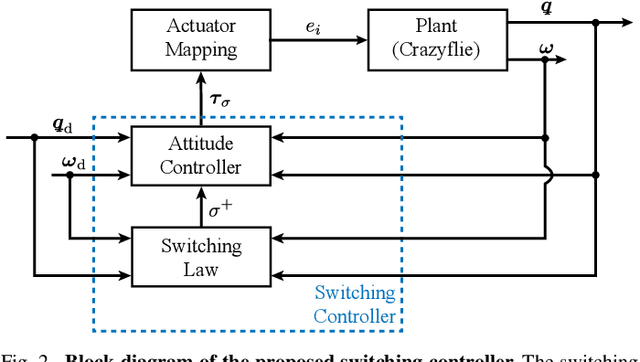
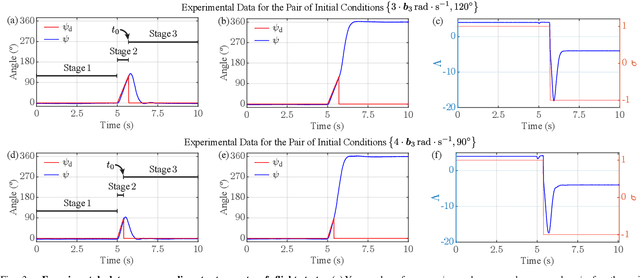
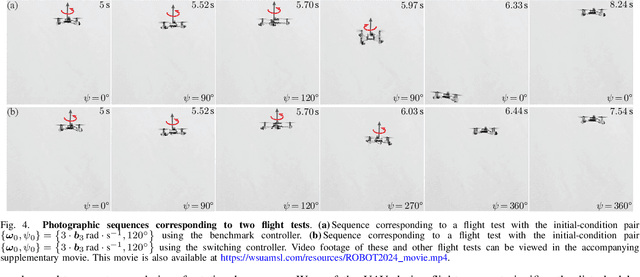
A New Type of Axis-Angle Attitude Control Law for Rotational Systems: Synthesis, Analysis, and Experiments
Oct 29, 2025Over the past few decades, continuous quaternion-based attitude control has been proven highly effective for driving rotational systems that can be modeled as rigid bodies, such as satellites and drones. However, methods rooted in this approach do not enforce the existence of a unique closed-loop (CL) equilibrium attitude-error quaternion (AEQ); and, for rotational errors about the attitude-error Euler axis larger than {\pi}rad, their proportional-control effect diminishes as the system state moves away from the stable equilibrium of the CL rotational dynamics. In this paper, we introduce a new type of attitude control law that more effectively leverages the attitude-error Euler axis-angle information to guarantee a unique CL equilibrium AEQ and to provide greater flexibility in the use of proportional-control efforts. Furthermore, using two different control laws as examples-through the construction of a strict Lyapunov function for the CL dynamics-we demonstrate that the resulting unique equilibrium of the CL rotational system can be enforced to be uniformly asymptotically stable. To assess and demonstrate the functionality and performance of the proposed approach, we performed numerical simulations and executed dozens of real-time tumble-recovery maneuvers using a small quadrotor. These simulations and flight tests compellingly demonstrate that the proposed axis-angle-based method achieves superior flight performance-compared with that obtained using a high-performance quaternion-based controller-in terms of stabilization time.
Safe Navigation under State Uncertainty: Online Adaptation for Robust Control Barrier Functions
Aug 26, 2025Measurements and state estimates are often imperfect in control practice, posing challenges for safety-critical applications, where safety guarantees rely on accurate state information. In the presence of estimation errors, several prior robust control barrier function (R-CBF) formulations have imposed strict conditions on the input. These methods can be overly conservative and can introduce issues such as infeasibility, high control effort, etc. This work proposes a systematic method to improve R-CBFs, and demonstrates its advantages on a tracked vehicle that navigates among multiple obstacles. A primary contribution is a new optimization-based online parameter adaptation scheme that reduces the conservativeness of existing R-CBFs. In order to reduce the complexity of the parameter optimization, we merge several safety constraints into one unified numerical CBF via Poisson's equation. We further address the dual relative degree issue that typically causes difficulty in vehicle tracking. Experimental trials demonstrate the overall performance improvement of our approach over existing formulations.
Dynamic Safety in Complex Environments: Synthesizing Safety Filters with Poisson's Equation
May 11, 2025



Synthesizing safe sets for robotic systems operating in complex and dynamically changing environments is a challenging problem. Solving this problem can enable the construction of safety filters that guarantee safe control actions -- most notably by employing Control Barrier Functions (CBFs). This paper presents an algorithm for generating safe sets from perception data by leveraging elliptic partial differential equations, specifically Poisson's equation. Given a local occupancy map, we solve Poisson's equation subject to Dirichlet boundary conditions, with a novel forcing function. Specifically, we design a smooth guidance vector field, which encodes gradient information required for safety. The result is a variational problem for which the unique minimizer -- a safety function -- characterizes the safe set. After establishing our theoretical result, we illustrate how safety functions can be used in CBF-based safety filtering. The real-time utility of our synthesis method is highlighted through hardware demonstrations on quadruped and humanoid robots navigating dynamically changing obstacle-filled environments.
Closed-Loop Stability of a Lyapunov-Based Switching Attitude Controller for Energy-Efficient Torque-Input-Selection During Flight
Nov 01, 2024

We present a new Lyapunov-based switching attitude controller for energy-efficient real-time selection of the torque inputted to an uncrewed aerial vehicle (UAV) during flight. The proposed method, using quaternions to describe the attitude of the controlled UAV, interchanges the stability properties of the two fixed points-one locally asymptotically stable and another unstable-of the resulting closed-loop (CL) switching dynamics of the system. In this approach, the switching events are triggered by the value of a compound energy-based function. To analyze and ensure the stability of the CL switching dynamics, we use classical nonlinear Lyapunov techniques, in combination with switching-systems theory. For this purpose, we introduce a new compound Lyapunov function (LF) that not only enables us to derive the conditions for CL asymptotic and exponential stability, but also provides us with an estimate of the CL system's region of attraction. This new estimate is considerably larger than those previously reported for systems of the type considered in this paper. To test and demonstrate the functionality, suitability, and performance of the proposed method, we present and discuss experimental data obtained using a 31-g quadrotor during the execution of high-speed yaw-tracking maneuvers. Also, we provide empirical evidence indicating that all the initial conditions chosen for these maneuvers, as estimated, lie inside the system's region of attraction. Last, experimental data obtained through these flight tests show that the proposed switching controller reduces the control effort by about 53%, on average, with respect to that corresponding to a commonly used benchmark control scheme, when executing a particular type of high-speed yaw-tracking maneuvers.
A Lyapunov-Based Switching Scheme for Selecting the Stable Closed-Loop Fixed Attitude-Error Quaternion During Flight
Oct 15, 2024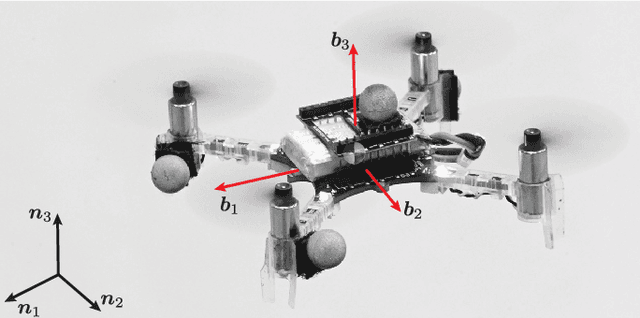
We present a switching scheme, which uses both the attitude-error quaternion (AEQ) and the angular-velocity error, for controlling the rotational degrees of freedom of an uncrewed aerial vehicle (UAV) during flight. In this approach, the proposed controller continually selects the stable closed-loop (CL) equilibrium AEQ corresponding to the smallest cost between those computed with two energy-based Lyapunov functions. To analyze and enforce the stability of the CL switching dynamics, we use basic nonlinear theory. This research problem is relevant because the selection of the stable CL equilibrium AEQ directly determines the power and energy requirements of the controlled UAV during flight. To test and demonstrate the implementation, suitability, functionality, and performance of the proposed approach, we present experimental results obtained using a 31-gram quadrotor, which was controlled to execute high-speed yaw maneuvers in flight. These flight tests show that the proposed switching controller can respectively reduce the control effort and rotational power by as much as 49.75 % and 28.14 %, on average, compared to those corresponding to an often-used benchmark controller.
Safety-Aware Perception for Autonomous Collision Avoidance in Dynamic Environments
Mar 20, 2024



Autonomous collision avoidance requires accurate environmental perception; however, flight systems often possess limited sensing capabilities with field-of-view (FOV) restrictions. To navigate this challenge, we present a safety-aware approach for online determination of the optimal sensor-pointing direction $\psi_\text{d}$ which utilizes control barrier functions (CBFs). First, we generate a spatial density function $\Phi$ which leverages CBF constraints to map the collision risk of all local coordinates. Then, we convolve $\Phi$ with an attitude-dependent sensor FOV quality function to produce the objective function $\Gamma$ which quantifies the total observed risk for a given pointing direction. Finally, by finding the global optimizer for $\Gamma$, we identify the value of $\psi_\text{d}$ which maximizes the perception of risk within the FOV. We incorporate $\psi_\text{d}$ into a safety-critical flight architecture and conduct a numerical analysis using multiple simulated mission profiles. Our algorithm achieves a success rate of $88-96\%$, constituting a $16-29\%$ improvement compared to the best heuristic methods. We demonstrate the functionality of our approach via a flight demonstration using the Crazyflie 2.1 micro-quadrotor. Without a priori obstacle knowledge, the quadrotor follows a dynamic flight path while simultaneously calculating and tracking $\psi_\text{d}$ to perceive and avoid two static obstacles with an average computation time of 371 $\mu$s.
MPS: A New Method for Selecting the Stable Closed-Loop Equilibrium Attitude-Error Quaternion of a UAV During Flight
Mar 12, 2024
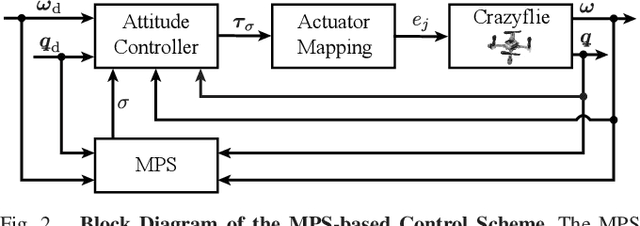

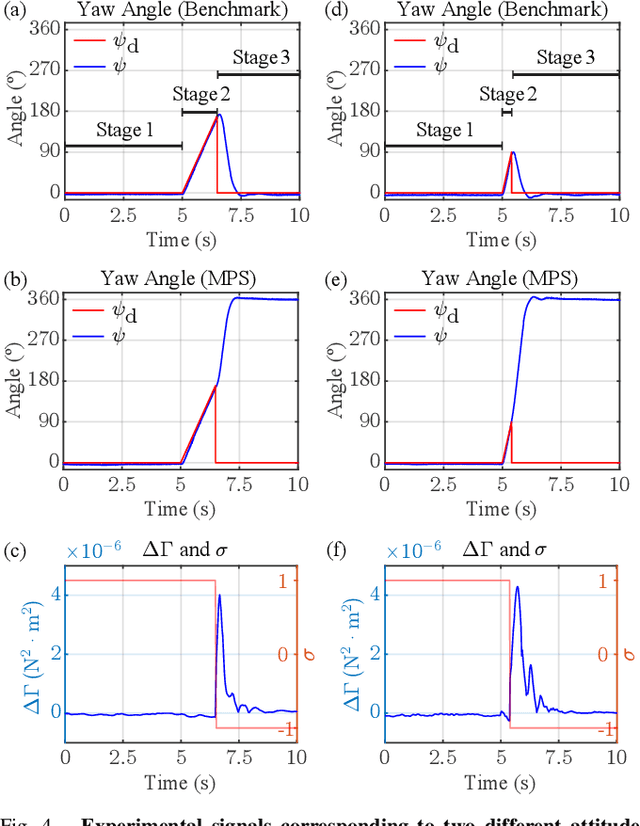
We present model predictive selection (MPS), a new method for selecting the stable closed-loop (CL) equilibrium attitude-error quaternion (AEQ) of an uncrewed aerial vehicle (UAV) during the execution of high-speed yaw maneuvers. In this approach, we minimize the cost of yawing measured with a performance figure of merit (PFM) that takes into account both the aerodynamic-torque control input and attitude-error state of the UAV. Specifically, this method uses a control law with a term whose sign is dynamically switched in real time to select, between two options, the torque associated with the lesser cost of rotation as predicted by a dynamical model of the UAV derived from first principles. This problem is relevant because the selection of the stable CL equilibrium AEQ significantly impacts the performance of a UAV during high-speed rotational flight, from both the power and control-error perspectives. To test and demonstrate the functionality and performance of the proposed method, we present data collected during one hundred real-time high-speed yaw-tracking flight experiments. These results highlight the superior capabilities of the proposed MPS-based scheme when compared to a benchmark controller commonly used in aerial robotics, as the PFM used to quantify the cost of flight is reduced by 60.30 %, on average. To our best knowledge, these are the first flight-test results that thoroughly demonstrate, evaluate, and compare the performance of a real-time controller capable of selecting the stable CL equilibrium AEQ during operation.