 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbodied Intelligence for Advanced Bioinspired Microrobotics: Examples and Insights
Oct 30, 2025The term embodied intelligence (EI) conveys the notion that body morphology, material properties, interaction with the environment, and control strategies can be purposefully integrated into the process of robotic design to generate intelligent behavior; in particular, locomotion and navigation. In this paper, we discuss EI as a design principle for advanced microrobotics, with a particular focus on co-design -- the simultaneous and interdependent development of physical structure and behavioral function. To illustrate the contrast between EI-inspired systems and traditional architectures that decouple sensing, computation, and actuation, we present and discuss a collection of robots developed by the author and his team at the Autonomous Microrobotic Systems Laboratory (AMSL). These robots exhibit intelligent behavior that emerges from their structural dynamics and the physical interaction between their components and with the environment. Platforms such as the Bee++, RoBeetle, SMALLBug, SMARTI, WaterStrider, VLEIBot+, and FRISSHBot exemplify how feedback loops, decision logics, sensing mechanisms, and smart actuation strategies can be embedded into the physical properties of the robotic system itself. Along these lines, we contend that co-design is not only a method for empirical optimization under constraints, but also an enabler of EI, offering a scalable and robust alternative to classical control for robotics at the mm-to-cm-scale.
Power-Efficient Actuation for Insect-Scale Autonomous Underwater Vehicles
Nov 27, 2024



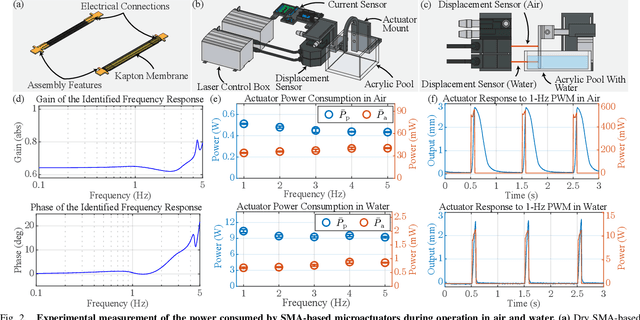
We present a new evolution of the Very Little Eel-Inspired roBot, the VLEIBot++, a 900-mg swimmer driven by two 10-mg bare high-work density (HWD) actuators, whose functionality is based on the use of shape-memory alloy (SMA) wires. An actuator of this type consumes an average power of about 40 mW during in-air operation. We integrated onboard power and computation into the VLEIBot++ using a custom-built printed circuit board (PCB) and an 11-mAh 3.7-V 507-mg single-cell lithium-ion (Li-Ion) battery, which in conjunction enable autonomous swimming for about 20 min on a single charge. This robot can swim at speeds of up to 18.7 mm/s (0.46 Bl/s) and is the first subgram microswimmer with onboard power, actuation, and computation developed to date. Unfortunately, the approach employed to actuate VLEIBot++ prototypes is infeasible for underwater applications because a typical 10-mg bare SMA-based microactuator requires an average power on the order of 800 mW when operating underwater. To address this issue, we introduce a new 13-mg power-efficient high-performance SMA-based microactuator that can function with similar power requirements (approx. 80 mW on average) and actuation performance (approx. 3 mm at low frequencies) in air and water. This design is based on the use of a sealed flexible air-capsule that encloses the SMA wires that drive the microactuator with the purpose of passively controlling the heat-transfer rate of the thermal system. Furthermore, this new power-efficient encapsulated actuator requires low voltages of excitation (3 to 4 V) and simple power electronics to function. The breakthroughs presented in this paper represent a path towards the creation of insect-scale autonomous underwater vehicles (AUVs).
A Lyapunov-Based Switching Scheme for Selecting the Stable Closed-Loop Fixed Attitude-Error Quaternion During Flight
Oct 15, 2024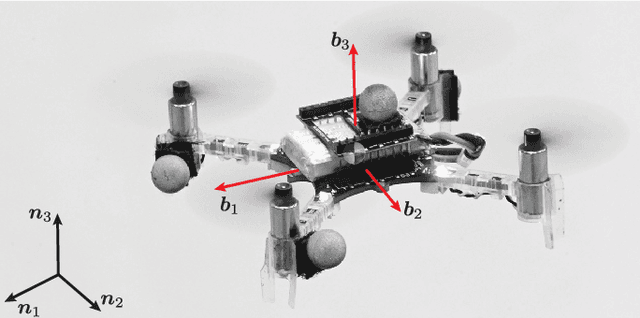
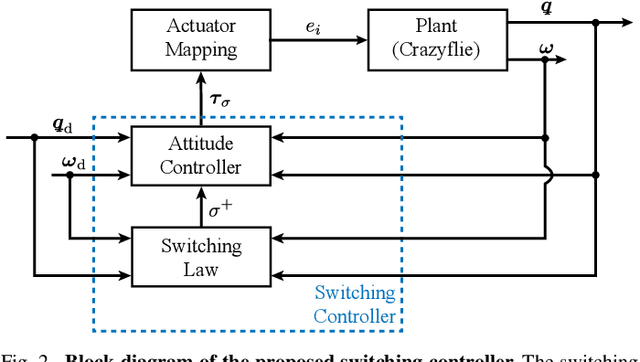
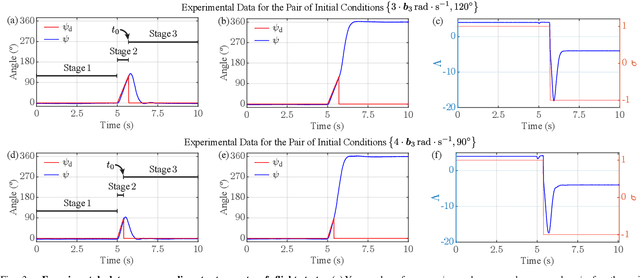
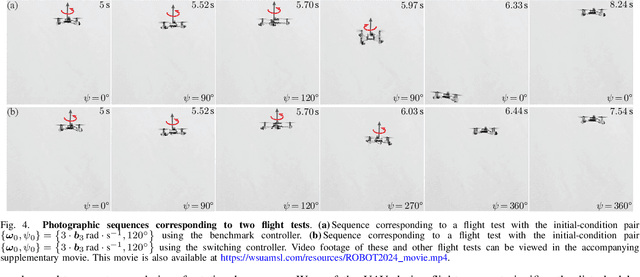
We present a switching scheme, which uses both the attitude-error quaternion (AEQ) and the angular-velocity error, for controlling the rotational degrees of freedom of an uncrewed aerial vehicle (UAV) during flight. In this approach, the proposed controller continually selects the stable closed-loop (CL) equilibrium AEQ corresponding to the smallest cost between those computed with two energy-based Lyapunov functions. To analyze and enforce the stability of the CL switching dynamics, we use basic nonlinear theory. This research problem is relevant because the selection of the stable CL equilibrium AEQ directly determines the power and energy requirements of the controlled UAV during flight. To test and demonstrate the implementation, suitability, functionality, and performance of the proposed approach, we present experimental results obtained using a 31-gram quadrotor, which was controlled to execute high-speed yaw maneuvers in flight. These flight tests show that the proposed switching controller can respectively reduce the control effort and rotational power by as much as 49.75 % and 28.14 %, on average, compared to those corresponding to an often-used benchmark controller.
A New 10-mg SMA-Based Fast Bimorph Actuator for Microrobotics
Sep 27, 2024We present a new millimeter-scale bimorph actuator for microrobotic applications, driven by feedforward controlled shape-memory alloy (SMA) wires. The device weighs 10 mg, measures 14 mm in length, and occupies a volume of 4.8 mm3, which makes it the lightest and smallest fully functional SMA-based bimorph actuator for microrobotics developed to date. The experimentally measured operational bandwidth is on the order of 20 Hz, and the unimorph and bimorph maximum low-frequency displacement outputs are on the order of 3.5 and 7 mm, respectively. To test and demonstrate the functionality and suitability of the actuator for microrobotics, we developed the Fish-&-Ribbon-Inspired Small Swimming Harmonic roBot (FRISSHBot). Loosely inspired by carangiformes, the FRISSHBot leverages fluid-structure interaction (FSI) phenomena to propel itself forward, weighs 30 mg, measures 34 mm in length, operates at frequencies of up to 4 Hz, and swims at speeds of up to 3.06 mm/s (0.09 Bl/s). This robot is the lightest and smallest swimmer with onboard actuation developed to date.
Progress Towards Submersible Microrobots: A Novel 13-mg Low-Power SMA-Based Actuator for Underwater Propulsion
Sep 26, 2024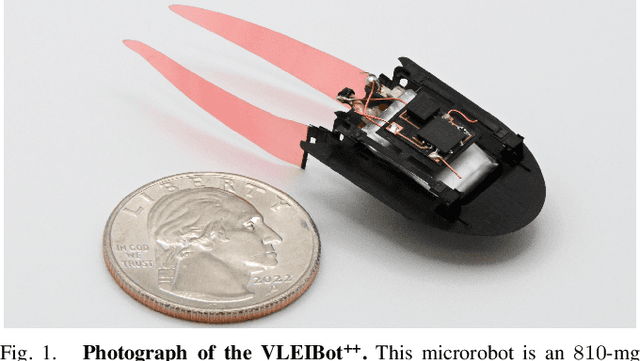
We introduce a new low-power 13-mg microactuator driven by shape-memory alloy (SMA) wires for underwater operation. The development of this device was motivated by the recent creation of microswimmers such as the FRISHBot, WaterStrider, VLEIBot, VLEIBot+, and VLEIBot++. The first four of these robots, ranging from 30 to 90 mg, function tethered to an electrical power supply while the last platform is an 810-mg fully autonomous system. These five robots are driven by dry SMA-based microactuators first developed for microrobotic crawlers such as the SMALLBug and SMARTI. As shown in this abstract, dry SMA-based actuators do not operate efficiently under water due to high heat-transfer rates in this medium; for example, the actuators that drive the VLEIBot++ require about 40 mW of average power at 1 Hz in dry air while requiring about 900 mW of average power at 1 Hz in water. In contrast, the microactuator presented in this abstract consumes about 150 mW of average power at 1 Hz in both dry air and water; additionally, it can be excited directly using an onboard battery through simple power electronics implemented on a custom-built printed circuit board (PCB). This technological breakthrough was enabled by the integration of a soft structure that encapsulates the SMA wires that drive the actuator in order to passively control the rates of heat transfer. The results presented here represent preliminary, yet compelling, experimental evidence that the proposed actuation approach will enable the development of fully autonomous and controllable submersible microswimmers. To accomplish this objective, we will evolve the current version of the VLEIBot++ and introduce new bioinspired underwater propulsion mechanisms.
Electronics-Free Pneumatic Logic Circuits for Localized Feedback Control of Multi-Actuator Soft Robots
Mar 08, 2020



The vision of creating entirely-soft robots capable of performing complex tasks will be accomplished only when the controllers required for autonomous operation can be fully implemented on soft components. Despite recent advances in compliant fluidic circuitry for mechanical signal processing, the applicability of this technology for soft robot control has been limited by complicated fabrication and tuning processes, and also the need for external signals such as clocks and digital references. We propose a method to develop pneumatic soft robots in which coordinated interactions between multiple actuators are performed using controllers implemented on components distributedly embedded in the soft structures of the system. In this approach, the notions of binary and multi-valued actuator logic states are introduced. In this way, the physical local dynamical couplings between the analog states of the actuators, established using soft valves of a new type, can be thought of as logic-gate-based mappings acting on discretized representations of the actuator states. Consequently, techniques for digital logic design can be applied to derive the architectures of the localized mechanical couplings that intelligently coordinate the oscillation patterns of the actuator responses. For the purposes of controller tuning, the soft valves are conceived so that their main physical parameters can be adjusted from the exterior of the robot through simple geometrical changes of the corresponding structural elements. To demonstrate the proposed approach, we present the development of a six-state locomoting soft robot.