 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Lyapunov-Based Switching Scheme for Selecting the Stable Closed-Loop Fixed Attitude-Error Quaternion During Flight
Oct 15, 2024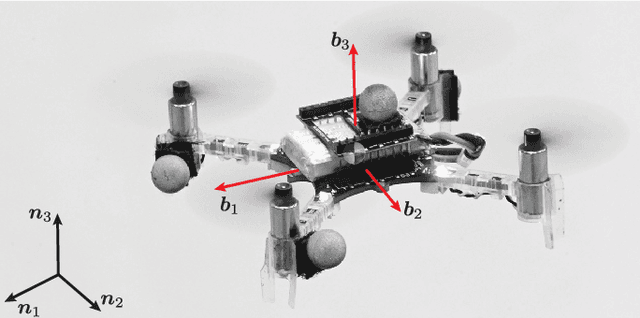
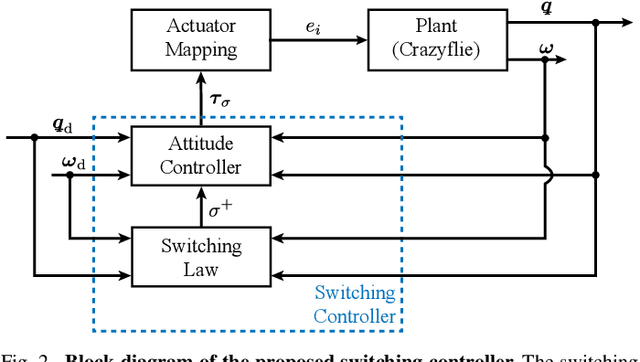
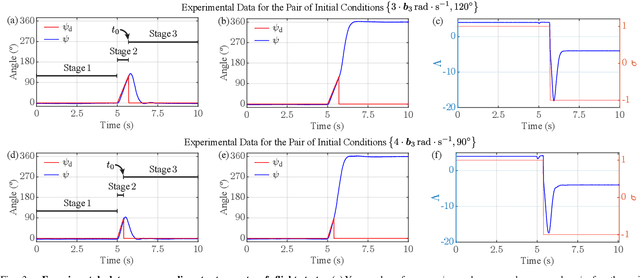
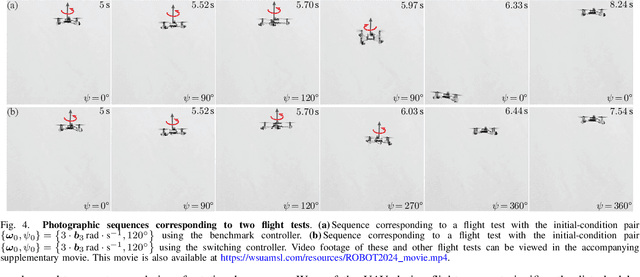
We present a switching scheme, which uses both the attitude-error quaternion (AEQ) and the angular-velocity error, for controlling the rotational degrees of freedom of an uncrewed aerial vehicle (UAV) during flight. In this approach, the proposed controller continually selects the stable closed-loop (CL) equilibrium AEQ corresponding to the smallest cost between those computed with two energy-based Lyapunov functions. To analyze and enforce the stability of the CL switching dynamics, we use basic nonlinear theory. This research problem is relevant because the selection of the stable CL equilibrium AEQ directly determines the power and energy requirements of the controlled UAV during flight. To test and demonstrate the implementation, suitability, functionality, and performance of the proposed approach, we present experimental results obtained using a 31-gram quadrotor, which was controlled to execute high-speed yaw maneuvers in flight. These flight tests show that the proposed switching controller can respectively reduce the control effort and rotational power by as much as 49.75 % and 28.14 %, on average, compared to those corresponding to an often-used benchmark controller.
Progress Towards Submersible Microrobots: A Novel 13-mg Low-Power SMA-Based Actuator for Underwater Propulsion
Sep 26, 2024
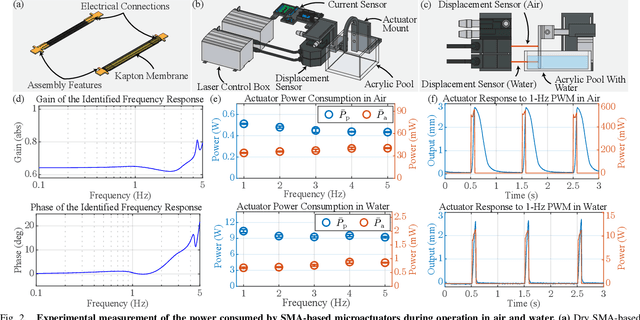
We introduce a new low-power 13-mg microactuator driven by shape-memory alloy (SMA) wires for underwater operation. The development of this device was motivated by the recent creation of microswimmers such as the FRISHBot, WaterStrider, VLEIBot, VLEIBot+, and VLEIBot++. The first four of these robots, ranging from 30 to 90 mg, function tethered to an electrical power supply while the last platform is an 810-mg fully autonomous system. These five robots are driven by dry SMA-based microactuators first developed for microrobotic crawlers such as the SMALLBug and SMARTI. As shown in this abstract, dry SMA-based actuators do not operate efficiently under water due to high heat-transfer rates in this medium; for example, the actuators that drive the VLEIBot++ require about 40 mW of average power at 1 Hz in dry air while requiring about 900 mW of average power at 1 Hz in water. In contrast, the microactuator presented in this abstract consumes about 150 mW of average power at 1 Hz in both dry air and water; additionally, it can be excited directly using an onboard battery through simple power electronics implemented on a custom-built printed circuit board (PCB). This technological breakthrough was enabled by the integration of a soft structure that encapsulates the SMA wires that drive the actuator in order to passively control the rates of heat transfer. The results presented here represent preliminary, yet compelling, experimental evidence that the proposed actuation approach will enable the development of fully autonomous and controllable submersible microswimmers. To accomplish this objective, we will evolve the current version of the VLEIBot++ and introduce new bioinspired underwater propulsion mechanisms.