 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeedback Control of a Single-Tail Bioinspired 59-mg Swimmer
Aug 11, 2025We present an evolved steerable version of the single-tail Fish-&-Ribbon-Inspired Small Swimming Harmonic roBot (FRISSHBot), a 59-mg biologically inspired swimmer, which is driven by a new shape-memory alloy (SMA)-based bimorph actuator. The new FRISSHBot is controllable in the two-dimensional (2D) space, which enabled the first demonstration of feedback-controlled trajectory tracking of a single-tail aquatic robot with onboard actuation at the subgram scale. These new capabilities are the result of a physics-informed design with an enlarged head and shortened tail relative to those of the original platform. Enhanced by its design, this new platform achieves forward swimming speeds of up to 13.6 mm/s (0.38 Bl/s), which is over four times that of the original platform. Furthermore, when following 2D references in closed loop, the tested FRISSHBot prototype attains forward swimming speeds of up to 9.1 mm/s, root-mean-square (RMS) tracking errors as low as 2.6 mm, turning rates of up to 13.1 {\deg}/s, and turning radii as small as 10 mm.
Power-Efficient Actuation for Insect-Scale Autonomous Underwater Vehicles
Nov 27, 2024



We present a new evolution of the Very Little Eel-Inspired roBot, the VLEIBot++, a 900-mg swimmer driven by two 10-mg bare high-work density (HWD) actuators, whose functionality is based on the use of shape-memory alloy (SMA) wires. An actuator of this type consumes an average power of about 40 mW during in-air operation. We integrated onboard power and computation into the VLEIBot++ using a custom-built printed circuit board (PCB) and an 11-mAh 3.7-V 507-mg single-cell lithium-ion (Li-Ion) battery, which in conjunction enable autonomous swimming for about 20 min on a single charge. This robot can swim at speeds of up to 18.7 mm/s (0.46 Bl/s) and is the first subgram microswimmer with onboard power, actuation, and computation developed to date. Unfortunately, the approach employed to actuate VLEIBot++ prototypes is infeasible for underwater applications because a typical 10-mg bare SMA-based microactuator requires an average power on the order of 800 mW when operating underwater. To address this issue, we introduce a new 13-mg power-efficient high-performance SMA-based microactuator that can function with similar power requirements (approx. 80 mW on average) and actuation performance (approx. 3 mm at low frequencies) in air and water. This design is based on the use of a sealed flexible air-capsule that encloses the SMA wires that drive the microactuator with the purpose of passively controlling the heat-transfer rate of the thermal system. Furthermore, this new power-efficient encapsulated actuator requires low voltages of excitation (3 to 4 V) and simple power electronics to function. The breakthroughs presented in this paper represent a path towards the creation of insect-scale autonomous underwater vehicles (AUVs).
Progress Towards Submersible Microrobots: A Novel 13-mg Low-Power SMA-Based Actuator for Underwater Propulsion
Sep 26, 2024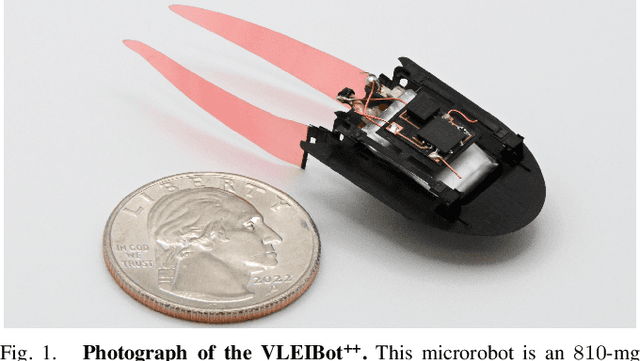
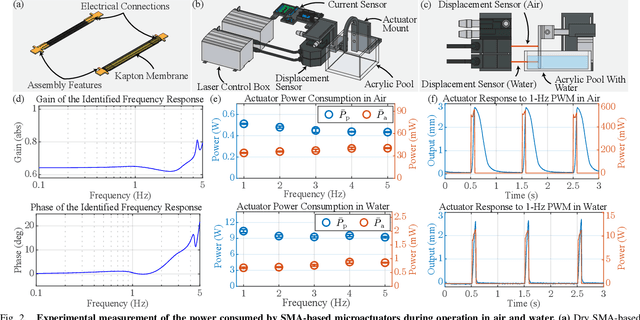
We introduce a new low-power 13-mg microactuator driven by shape-memory alloy (SMA) wires for underwater operation. The development of this device was motivated by the recent creation of microswimmers such as the FRISHBot, WaterStrider, VLEIBot, VLEIBot+, and VLEIBot++. The first four of these robots, ranging from 30 to 90 mg, function tethered to an electrical power supply while the last platform is an 810-mg fully autonomous system. These five robots are driven by dry SMA-based microactuators first developed for microrobotic crawlers such as the SMALLBug and SMARTI. As shown in this abstract, dry SMA-based actuators do not operate efficiently under water due to high heat-transfer rates in this medium; for example, the actuators that drive the VLEIBot++ require about 40 mW of average power at 1 Hz in dry air while requiring about 900 mW of average power at 1 Hz in water. In contrast, the microactuator presented in this abstract consumes about 150 mW of average power at 1 Hz in both dry air and water; additionally, it can be excited directly using an onboard battery through simple power electronics implemented on a custom-built printed circuit board (PCB). This technological breakthrough was enabled by the integration of a soft structure that encapsulates the SMA wires that drive the actuator in order to passively control the rates of heat transfer. The results presented here represent preliminary, yet compelling, experimental evidence that the proposed actuation approach will enable the development of fully autonomous and controllable submersible microswimmers. To accomplish this objective, we will evolve the current version of the VLEIBot++ and introduce new bioinspired underwater propulsion mechanisms.