 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Autonomous Subgram SMA-Based Swimmer
Jun 12, 2026We present the Swima, a bioinspired 900-mg swimmer propelled by two 10-mg high-work-density (HWD) actuators driven by shape-memory alloy (SMA) wires. We integrated onboard power and computation by using a custom-built printed circuit board (PCB) and an 11-mAh 3.7-V 507-mg single-cell lithium-ion (Li-Ion) battery, which in conjunction enable autonomous swimming in excess of 18 min. The Swima can swim at speeds of up to 22.4 mm/s (0.56 Bl/s), achieves turning rates of up to 14°/s, and can follow 0-degree heading reference trajectories with root mean square (RMS) values of tracking errors of about 6.5° across multiple tests. This robot is the first subgram microswimmer with onboard power, actuation, and computation developed to date.
A Class of Axis-Angle Attitude Control Laws for Rotational Systems
Dec 22, 2025



We introduce a new class of attitude control laws for rotational systems, which generalizes the use of the Euler axis-angle representation beyond quaternion-based formulations. Using basic Lyapunov's stability theory and the notion of extended $K_{\infty}$ functions, we developed a method for determining and enforcing the global asymptotic stability of the single fixed point of the resulting closed-loop (CL) scheme. In contrast with traditional quaternion-based methods, the proposed generalized axis-angle approach enables greater flexibility in the design of the control law, which is of great utility when employed in combination with a switching scheme whose transition state depends on the angular velocity of the controlled rotational system. Through simulation and real-time experimental results, we demonstrate the effectiveness of the proposed approach. According to the recorded data, in the execution of high-speed tumble-recovery maneuvers, the new method consistently achieves shorter stabilization times and requires lower control effort relative to those corresponding to the quaternion-based and geometric-control methods used as benchmarks.
A New Type of Axis-Angle Attitude Control Law for Rotational Systems: Synthesis, Analysis, and Experiments
Oct 29, 2025Over the past few decades, continuous quaternion-based attitude control has been proven highly effective for driving rotational systems that can be modeled as rigid bodies, such as satellites and drones. However, methods rooted in this approach do not enforce the existence of a unique closed-loop (CL) equilibrium attitude-error quaternion (AEQ); and, for rotational errors about the attitude-error Euler axis larger than {\pi}rad, their proportional-control effect diminishes as the system state moves away from the stable equilibrium of the CL rotational dynamics. In this paper, we introduce a new type of attitude control law that more effectively leverages the attitude-error Euler axis-angle information to guarantee a unique CL equilibrium AEQ and to provide greater flexibility in the use of proportional-control efforts. Furthermore, using two different control laws as examples-through the construction of a strict Lyapunov function for the CL dynamics-we demonstrate that the resulting unique equilibrium of the CL rotational system can be enforced to be uniformly asymptotically stable. To assess and demonstrate the functionality and performance of the proposed approach, we performed numerical simulations and executed dozens of real-time tumble-recovery maneuvers using a small quadrotor. These simulations and flight tests compellingly demonstrate that the proposed axis-angle-based method achieves superior flight performance-compared with that obtained using a high-performance quaternion-based controller-in terms of stabilization time.
Feedback Control of a Single-Tail Bioinspired 59-mg Swimmer
Aug 11, 2025We present an evolved steerable version of the single-tail Fish-&-Ribbon-Inspired Small Swimming Harmonic roBot (FRISSHBot), a 59-mg biologically inspired swimmer, which is driven by a new shape-memory alloy (SMA)-based bimorph actuator. The new FRISSHBot is controllable in the two-dimensional (2D) space, which enabled the first demonstration of feedback-controlled trajectory tracking of a single-tail aquatic robot with onboard actuation at the subgram scale. These new capabilities are the result of a physics-informed design with an enlarged head and shortened tail relative to those of the original platform. Enhanced by its design, this new platform achieves forward swimming speeds of up to 13.6 mm/s (0.38 Bl/s), which is over four times that of the original platform. Furthermore, when following 2D references in closed loop, the tested FRISSHBot prototype attains forward swimming speeds of up to 9.1 mm/s, root-mean-square (RMS) tracking errors as low as 2.6 mm, turning rates of up to 13.1 {\deg}/s, and turning radii as small as 10 mm.
Closed-Loop Stability of a Lyapunov-Based Switching Attitude Controller for Energy-Efficient Torque-Input-Selection During Flight
Nov 01, 2024

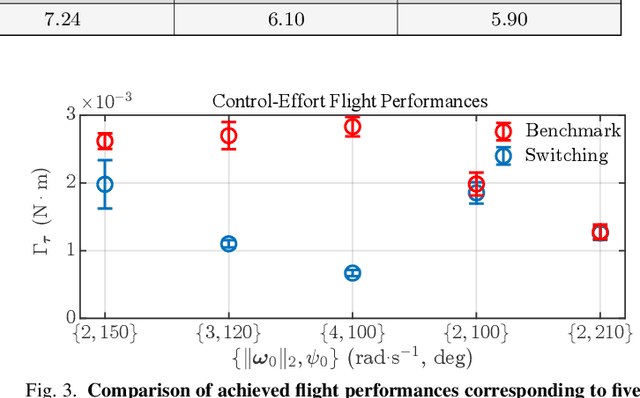
We present a new Lyapunov-based switching attitude controller for energy-efficient real-time selection of the torque inputted to an uncrewed aerial vehicle (UAV) during flight. The proposed method, using quaternions to describe the attitude of the controlled UAV, interchanges the stability properties of the two fixed points-one locally asymptotically stable and another unstable-of the resulting closed-loop (CL) switching dynamics of the system. In this approach, the switching events are triggered by the value of a compound energy-based function. To analyze and ensure the stability of the CL switching dynamics, we use classical nonlinear Lyapunov techniques, in combination with switching-systems theory. For this purpose, we introduce a new compound Lyapunov function (LF) that not only enables us to derive the conditions for CL asymptotic and exponential stability, but also provides us with an estimate of the CL system's region of attraction. This new estimate is considerably larger than those previously reported for systems of the type considered in this paper. To test and demonstrate the functionality, suitability, and performance of the proposed method, we present and discuss experimental data obtained using a 31-g quadrotor during the execution of high-speed yaw-tracking maneuvers. Also, we provide empirical evidence indicating that all the initial conditions chosen for these maneuvers, as estimated, lie inside the system's region of attraction. Last, experimental data obtained through these flight tests show that the proposed switching controller reduces the control effort by about 53%, on average, with respect to that corresponding to a commonly used benchmark control scheme, when executing a particular type of high-speed yaw-tracking maneuvers.
MPS: A New Method for Selecting the Stable Closed-Loop Equilibrium Attitude-Error Quaternion of a UAV During Flight
Mar 12, 2024
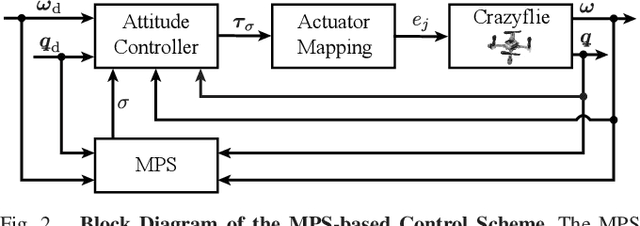

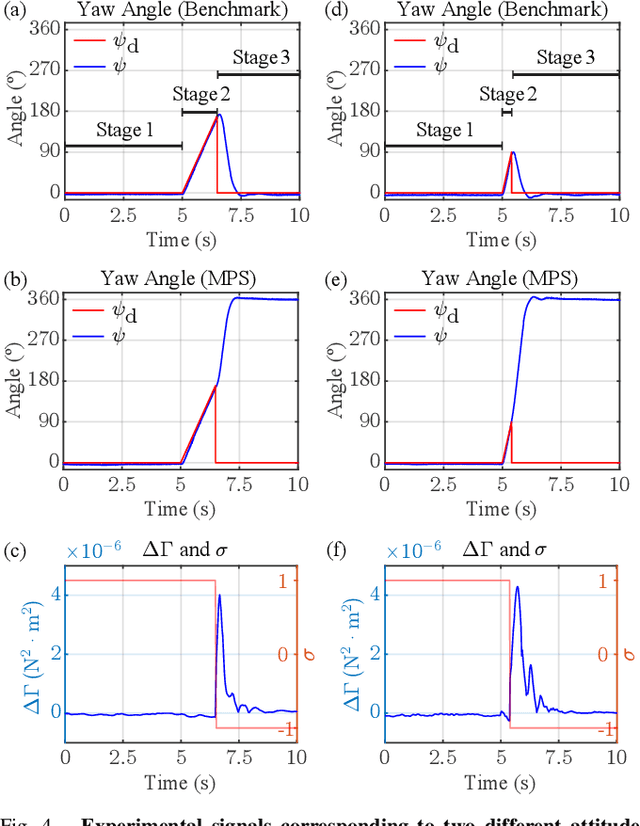
We present model predictive selection (MPS), a new method for selecting the stable closed-loop (CL) equilibrium attitude-error quaternion (AEQ) of an uncrewed aerial vehicle (UAV) during the execution of high-speed yaw maneuvers. In this approach, we minimize the cost of yawing measured with a performance figure of merit (PFM) that takes into account both the aerodynamic-torque control input and attitude-error state of the UAV. Specifically, this method uses a control law with a term whose sign is dynamically switched in real time to select, between two options, the torque associated with the lesser cost of rotation as predicted by a dynamical model of the UAV derived from first principles. This problem is relevant because the selection of the stable CL equilibrium AEQ significantly impacts the performance of a UAV during high-speed rotational flight, from both the power and control-error perspectives. To test and demonstrate the functionality and performance of the proposed method, we present data collected during one hundred real-time high-speed yaw-tracking flight experiments. These results highlight the superior capabilities of the proposed MPS-based scheme when compared to a benchmark controller commonly used in aerial robotics, as the PFM used to quantify the cost of flight is reduced by 60.30 %, on average. To our best knowledge, these are the first flight-test results that thoroughly demonstrate, evaluate, and compare the performance of a real-time controller capable of selecting the stable CL equilibrium AEQ during operation.
Bee$^+$: A 95-mg Four-Winged Insect-Scale Flying Robot Driven by Twinned Unimorph Actuators
May 06, 2019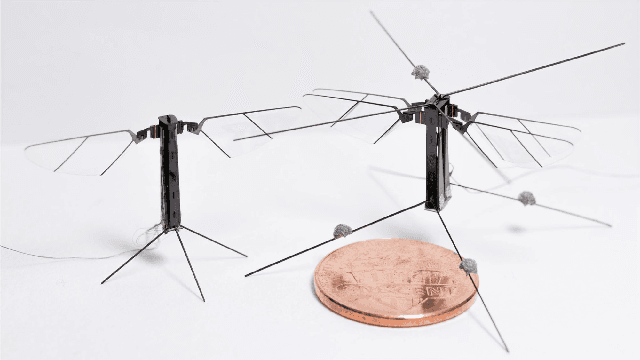
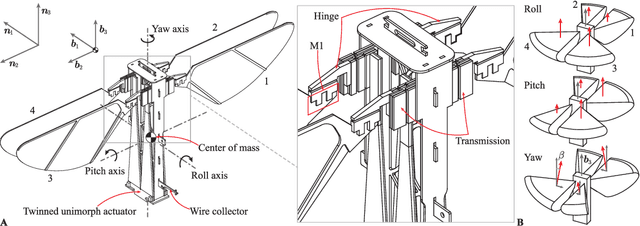
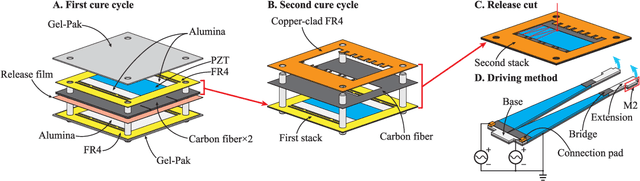
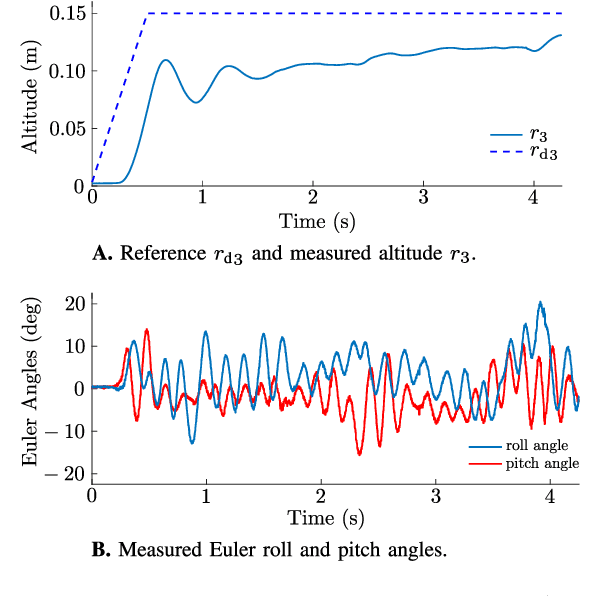
We introduce Bee$^+$, a 95-mg four-winged microrobot with improved controllability and open-loop-response characteristics with respect to those exhibited by state-of-the-art two-winged microrobots with the same size and similar weight (i.e., the 75-mg Harvard RoboBee and similar prototypes). The key innovation that made possible the development of Bee$^+$ is the introduction of an extremely light (28-mg) twinned unimorph actuator, which enabled the design of a new microrobotic mechanism that flaps four wings independently. A first main advantage of the proposed design, compared to two-winged RoboBee-like flyers, is that by increasing the number of actuators from two to four, the number of direct control inputs increases from three (roll-torque, pitch-torque and thrust-force) to four (roll-torque, pitch-torque, yaw-torque and thrust-force) when simple sinusoidal excitations are employed. A second advantage of Bee$^+$ is that its four-wing configuration and flapping mode naturally damped the rotational disturbances that commonly affect the yaw degree of freedom of two-winged microrobots. In addition, the design of Bee$^+$ greatly reduces the complexity of the associated fabrication process compared to those of other microrobots, as the unimorph actuators are fairly easy to build. Lastly, we hypothesize that given the relatively low wing-loading affecting their flapping mechanisms, the life expectancy of Bee$^+$s must be considerably higher than those of the two-winged counterparts. The functionality and basic capabilities of Bee$^+$ are demonstrated through a set of simple control experiments. We anticipate that this new platform will enable the implementation of high-performance controllers for the execution of high-speed aerobatic maneuvers at the sub-100-mg scale as well as diversifying the lines of research in the quest for achieving full autonomy at the sub-gram scale.
An Earthworm-Inspired Soft Crawling Robot Controlled by Friction
Oct 18, 2017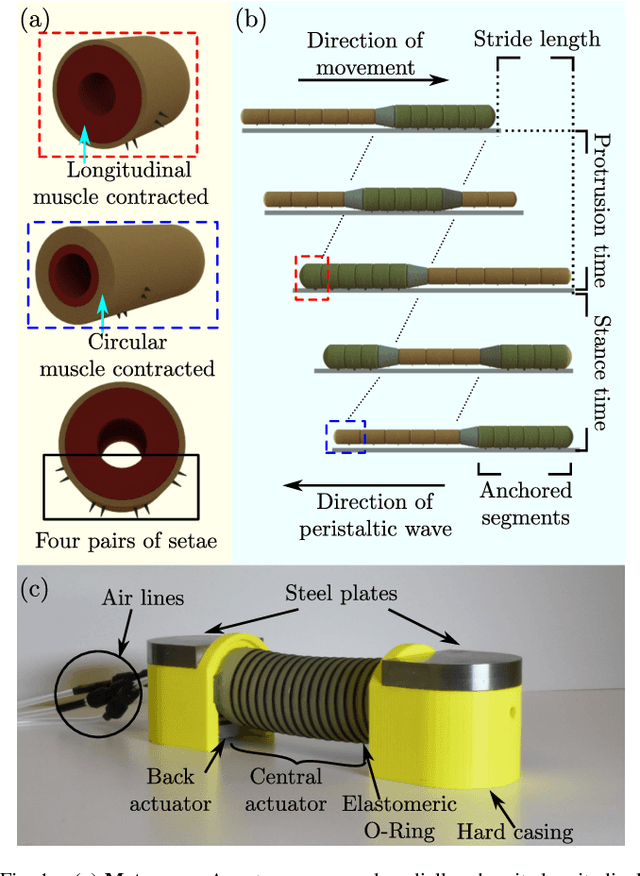
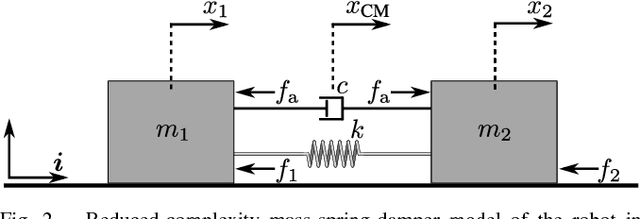
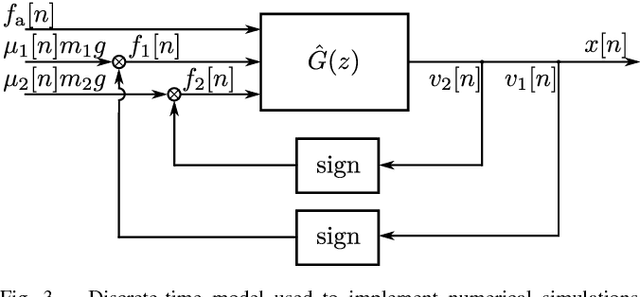
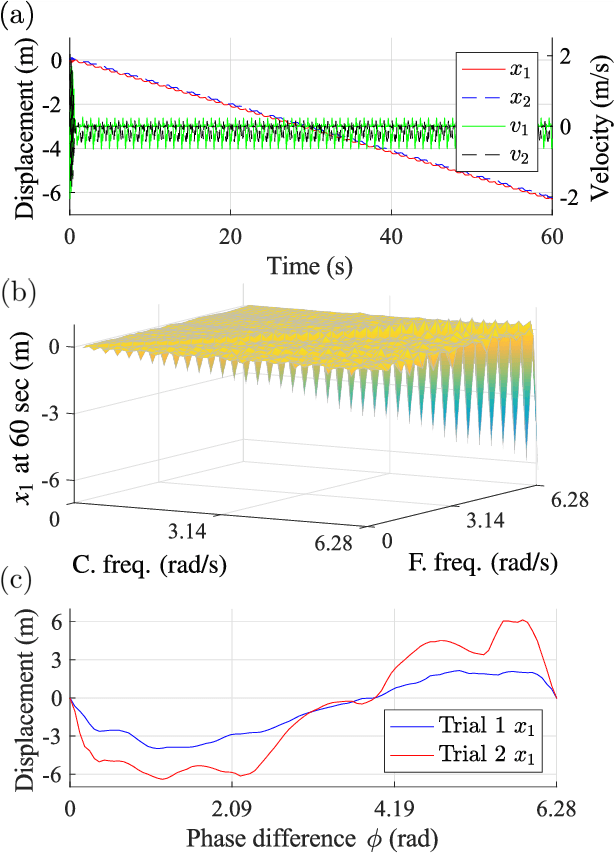
We present the modeling, design, fabrication and feedback control of an earthworm-inspired soft robot capable of crawling on surfaces by actively manipulating the frictional force between its body and the surface. Earthworms are segmented worms composed of repeating units known as metameres. The muscle and setae structure embedded in each individual metamere makes possible its peristaltic locomotion both under and above ground. Here, we propose a pneumatically-driven soft robotic system made of parts analogous to the muscle and setae structure and can replicate the crawling motion of a single earthworm metamere. A model is also introduced to describe the crawling dynamics of the proposed robotic system and proven be controllable. Robust crawling locomotion is then experimentally verified.