 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBee$^+$: A 95-mg Four-Winged Insect-Scale Flying Robot Driven by Twinned Unimorph Actuators
May 06, 2019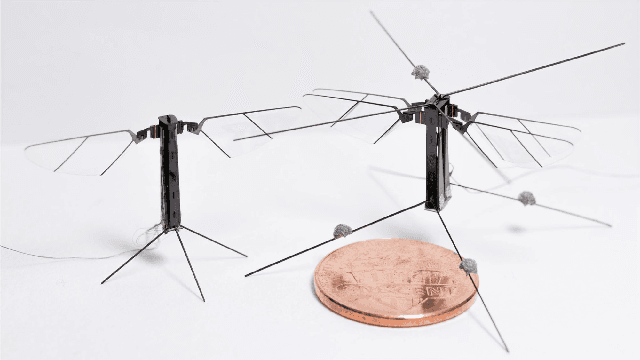
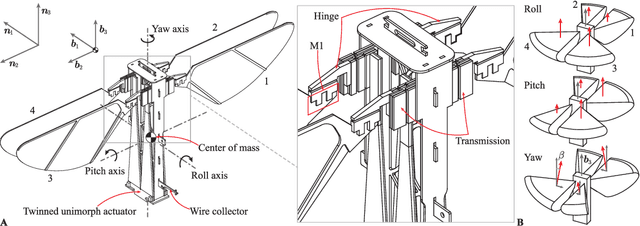
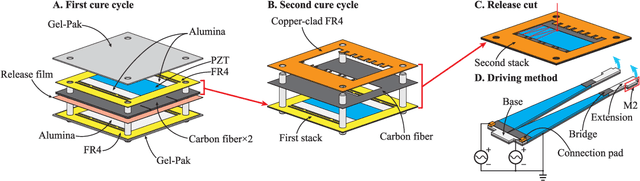
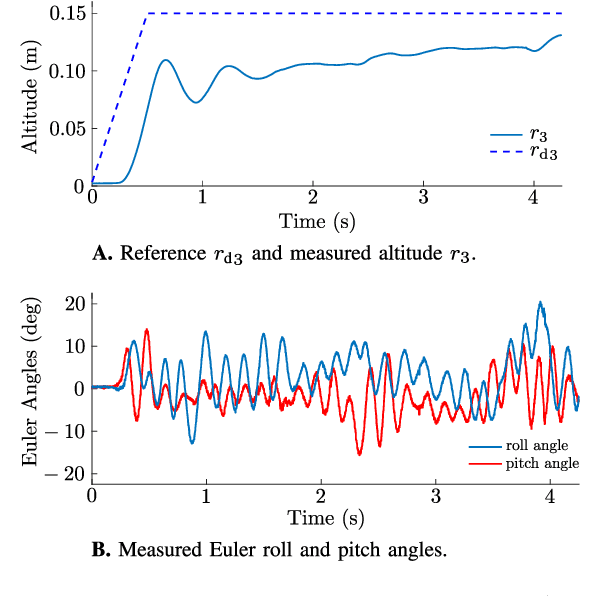
We introduce Bee$^+$, a 95-mg four-winged microrobot with improved controllability and open-loop-response characteristics with respect to those exhibited by state-of-the-art two-winged microrobots with the same size and similar weight (i.e., the 75-mg Harvard RoboBee and similar prototypes). The key innovation that made possible the development of Bee$^+$ is the introduction of an extremely light (28-mg) twinned unimorph actuator, which enabled the design of a new microrobotic mechanism that flaps four wings independently. A first main advantage of the proposed design, compared to two-winged RoboBee-like flyers, is that by increasing the number of actuators from two to four, the number of direct control inputs increases from three (roll-torque, pitch-torque and thrust-force) to four (roll-torque, pitch-torque, yaw-torque and thrust-force) when simple sinusoidal excitations are employed. A second advantage of Bee$^+$ is that its four-wing configuration and flapping mode naturally damped the rotational disturbances that commonly affect the yaw degree of freedom of two-winged microrobots. In addition, the design of Bee$^+$ greatly reduces the complexity of the associated fabrication process compared to those of other microrobots, as the unimorph actuators are fairly easy to build. Lastly, we hypothesize that given the relatively low wing-loading affecting their flapping mechanisms, the life expectancy of Bee$^+$s must be considerably higher than those of the two-winged counterparts. The functionality and basic capabilities of Bee$^+$ are demonstrated through a set of simple control experiments. We anticipate that this new platform will enable the implementation of high-performance controllers for the execution of high-speed aerobatic maneuvers at the sub-100-mg scale as well as diversifying the lines of research in the quest for achieving full autonomy at the sub-gram scale.
An Earthworm-Inspired Soft Crawling Robot Controlled by Friction
Oct 18, 2017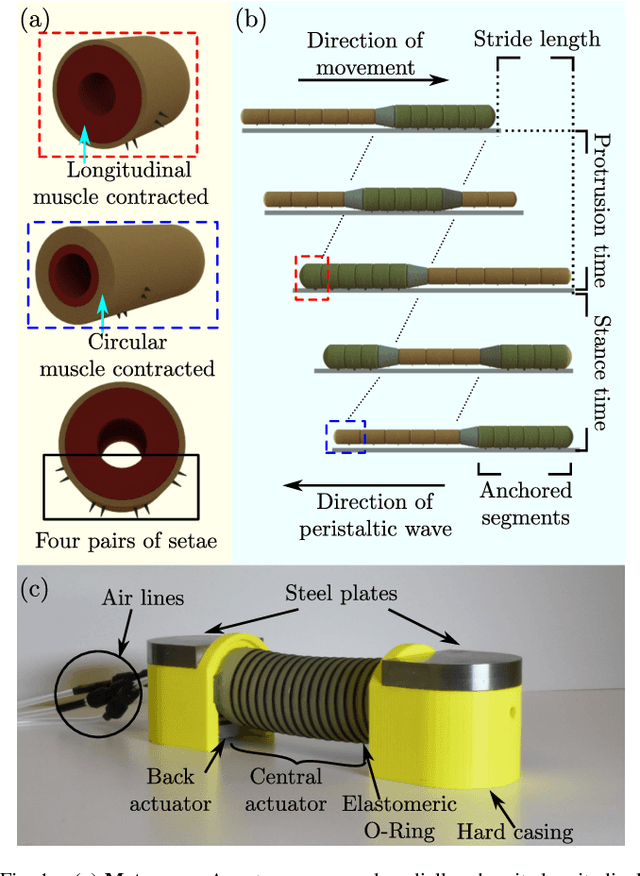
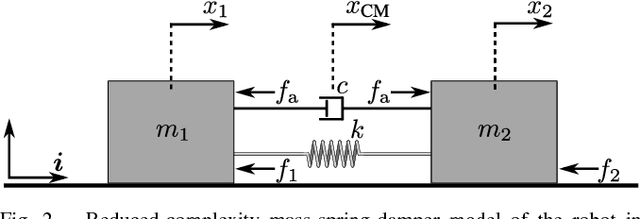
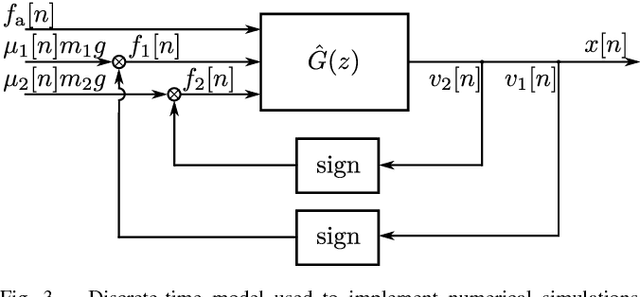
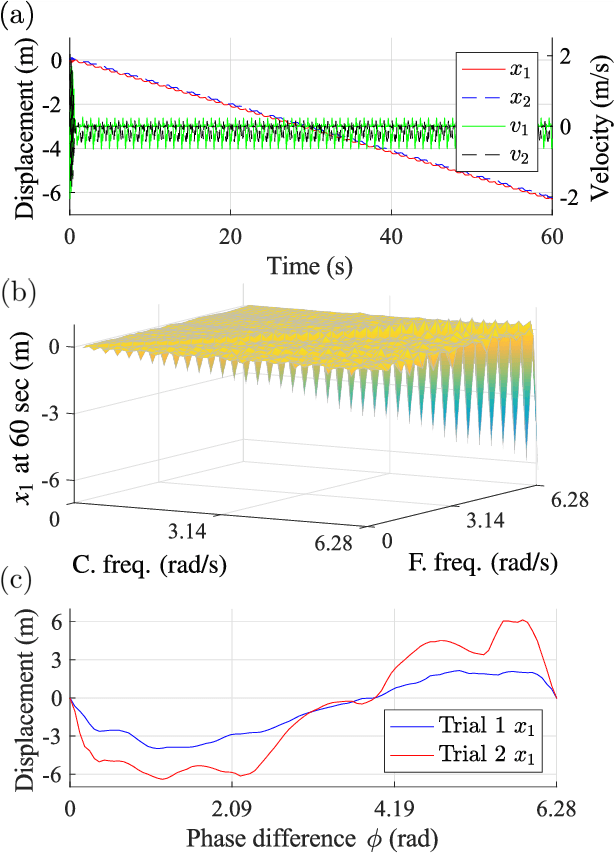
We present the modeling, design, fabrication and feedback control of an earthworm-inspired soft robot capable of crawling on surfaces by actively manipulating the frictional force between its body and the surface. Earthworms are segmented worms composed of repeating units known as metameres. The muscle and setae structure embedded in each individual metamere makes possible its peristaltic locomotion both under and above ground. Here, we propose a pneumatically-driven soft robotic system made of parts analogous to the muscle and setae structure and can replicate the crawling motion of a single earthworm metamere. A model is also introduced to describe the crawling dynamics of the proposed robotic system and proven be controllable. Robust crawling locomotion is then experimentally verified.