 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGAIA-2: A Controllable Multi-View Generative World Model for Autonomous Driving
Mar 26, 2025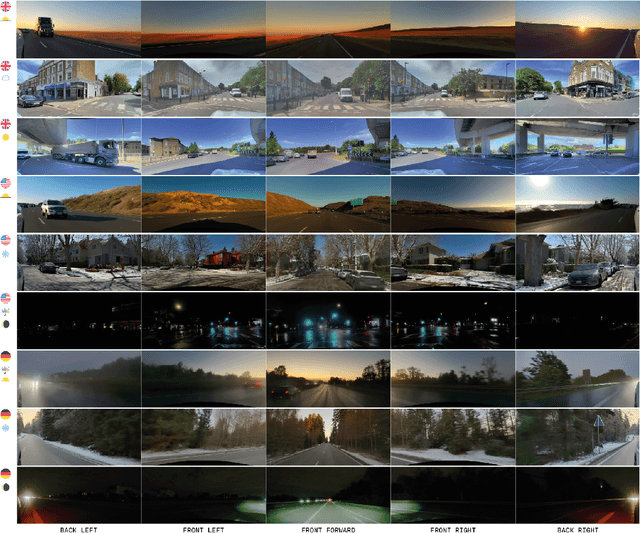
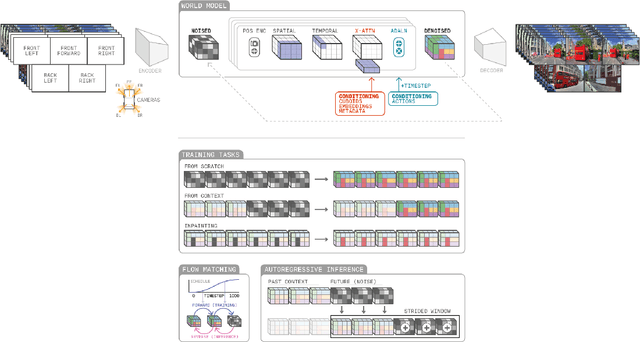
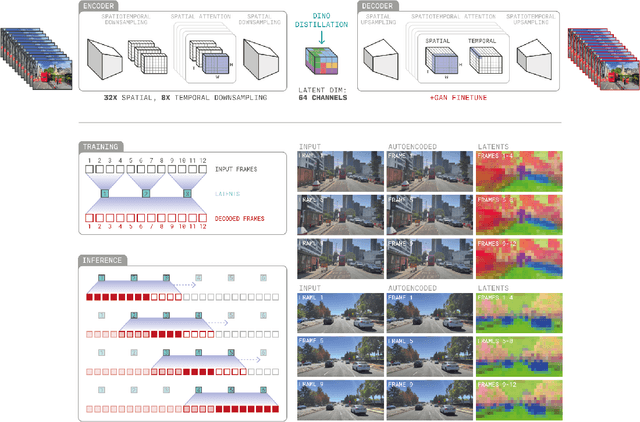
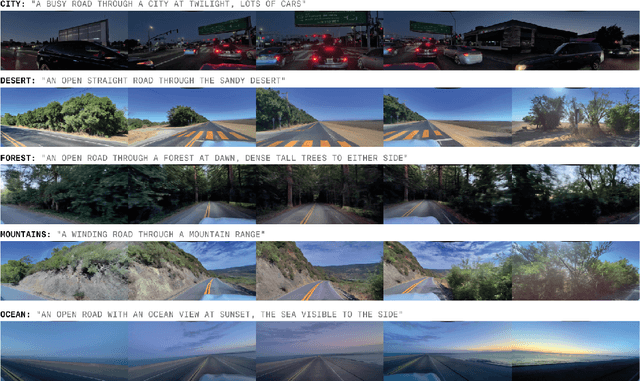
Generative models offer a scalable and flexible paradigm for simulating complex environments, yet current approaches fall short in addressing the domain-specific requirements of autonomous driving - such as multi-agent interactions, fine-grained control, and multi-camera consistency. We introduce GAIA-2, Generative AI for Autonomy, a latent diffusion world model that unifies these capabilities within a single generative framework. GAIA-2 supports controllable video generation conditioned on a rich set of structured inputs: ego-vehicle dynamics, agent configurations, environmental factors, and road semantics. It generates high-resolution, spatiotemporally consistent multi-camera videos across geographically diverse driving environments (UK, US, Germany). The model integrates both structured conditioning and external latent embeddings (e.g., from a proprietary driving model) to facilitate flexible and semantically grounded scene synthesis. Through this integration, GAIA-2 enables scalable simulation of both common and rare driving scenarios, advancing the use of generative world models as a core tool in the development of autonomous systems. Videos are available at https://wayve.ai/thinking/gaia-2.
LangProp: A code optimization framework using Language Models applied to driving
Jan 18, 2024



LangProp is a framework for iteratively optimizing code generated by large language models (LLMs) in a supervised/reinforcement learning setting. While LLMs can generate sensible solutions zero-shot, the solutions are often sub-optimal. Especially for code generation tasks, it is likely that the initial code will fail on certain edge cases. LangProp automatically evaluates the code performance on a dataset of input-output pairs, as well as catches any exceptions, and feeds the results back to the LLM in the training loop, so that the LLM can iteratively improve the code it generates. By adopting a metric- and data-driven training paradigm for this code optimization procedure, one could easily adapt findings from traditional machine learning techniques such as imitation learning, DAgger, and reinforcement learning. We demonstrate the first proof of concept of automated code optimization for autonomous driving in CARLA, showing that LangProp can generate interpretable and transparent driving policies that can be verified and improved in a metric- and data-driven way. Our code will be open-sourced and is available at https://github.com/shuishida/LangProp.
GAIA-1: A Generative World Model for Autonomous Driving
Sep 29, 2023Autonomous driving promises transformative improvements to transportation, but building systems capable of safely navigating the unstructured complexity of real-world scenarios remains challenging. A critical problem lies in effectively predicting the various potential outcomes that may emerge in response to the vehicle's actions as the world evolves. To address this challenge, we introduce GAIA-1 ('Generative AI for Autonomy'), a generative world model that leverages video, text, and action inputs to generate realistic driving scenarios while offering fine-grained control over ego-vehicle behavior and scene features. Our approach casts world modeling as an unsupervised sequence modeling problem by mapping the inputs to discrete tokens, and predicting the next token in the sequence. Emerging properties from our model include learning high-level structures and scene dynamics, contextual awareness, generalization, and understanding of geometry. The power of GAIA-1's learned representation that captures expectations of future events, combined with its ability to generate realistic samples, provides new possibilities for innovation in the field of autonomy, enabling enhanced and accelerated training of autonomous driving technology.