 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraspClutter6D: A Large-scale Real-world Dataset for Robust Perception and Grasping in Cluttered Scenes
Apr 09, 2025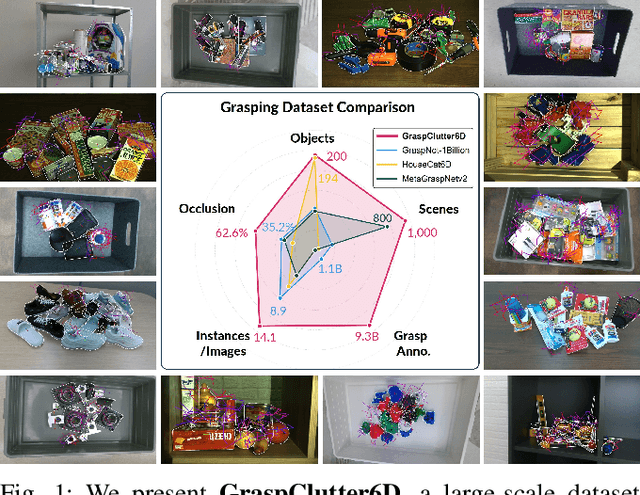
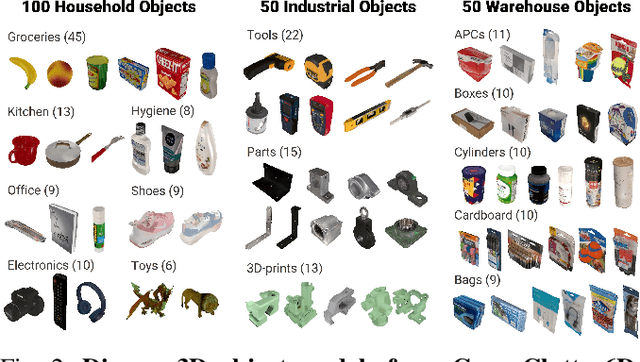
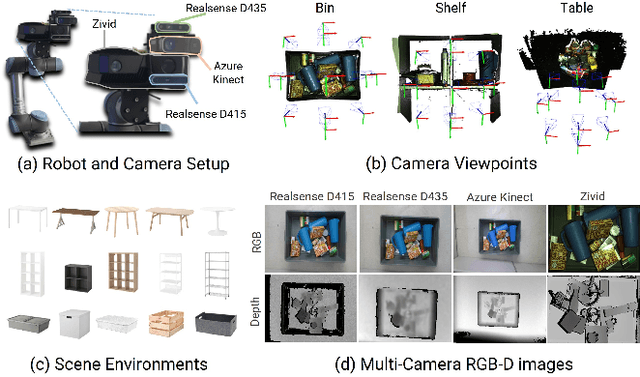
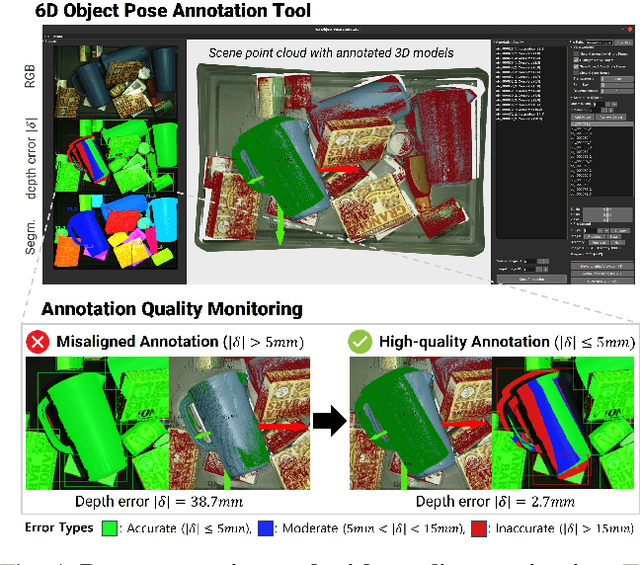
Robust grasping in cluttered environments remains an open challenge in robotics. While benchmark datasets have significantly advanced deep learning methods, they mainly focus on simplistic scenes with light occlusion and insufficient diversity, limiting their applicability to practical scenarios. We present GraspClutter6D, a large-scale real-world grasping dataset featuring: (1) 1,000 highly cluttered scenes with dense arrangements (14.1 objects/scene, 62.6\% occlusion), (2) comprehensive coverage across 200 objects in 75 environment configurations (bins, shelves, and tables) captured using four RGB-D cameras from multiple viewpoints, and (3) rich annotations including 736K 6D object poses and 9.3B feasible robotic grasps for 52K RGB-D images. We benchmark state-of-the-art segmentation, object pose estimation, and grasping detection methods to provide key insights into challenges in cluttered environments. Additionally, we validate the dataset's effectiveness as a training resource, demonstrating that grasping networks trained on GraspClutter6D significantly outperform those trained on existing datasets in both simulation and real-world experiments. The dataset, toolkit, and annotation tools are publicly available on our project website: https://sites.google.com/view/graspclutter6d.
PolyFit: A Peg-in-hole Assembly Framework for Unseen Polygon Shapes via Sim-to-real Adaptation
Dec 05, 2023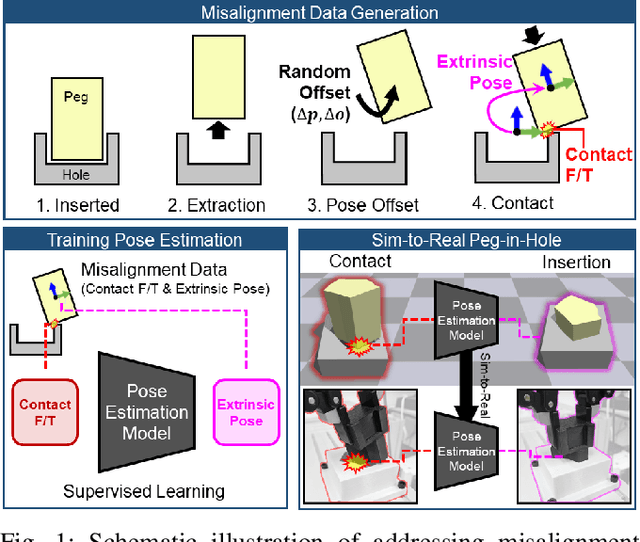
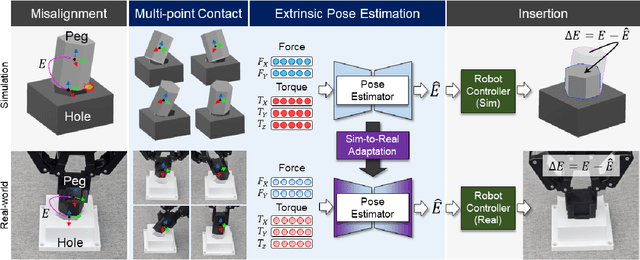
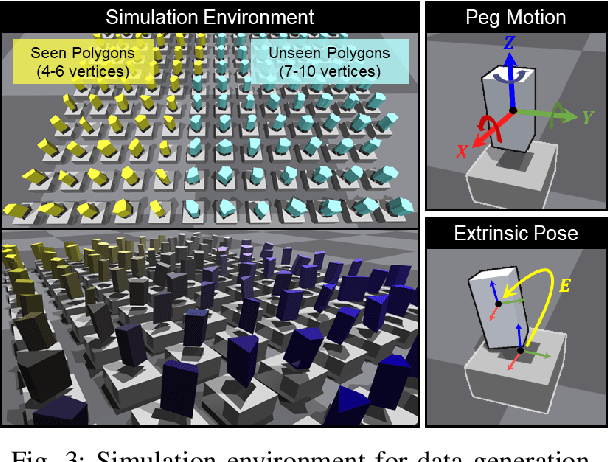
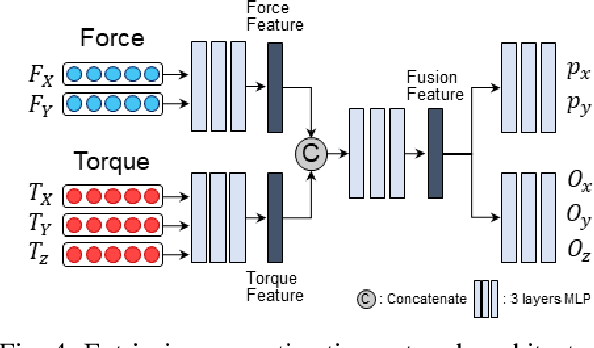
The study addresses the foundational and challenging task of peg-in-hole assembly in robotics, where misalignments caused by sensor inaccuracies and mechanical errors often result in insertion failures or jamming. This research introduces PolyFit, representing a paradigm shift by transitioning from a reinforcement learning approach to a supervised learning methodology. PolyFit is a Force/Torque (F/T)-based supervised learning framework designed for 5-DoF peg-in-hole assembly. It utilizes F/T data for accurate extrinsic pose estimation and adjusts the peg pose to rectify misalignments. Extensive training in a simulated environment involves a dataset encompassing a diverse range of peg-hole shapes, extrinsic poses, and their corresponding contact F/T readings. To enhance extrinsic pose estimation, a multi-point contact strategy is integrated into the model input, recognizing that identical F/T readings can indicate different poses. The study proposes a sim-to-real adaptation method for real-world application, using a sim-real paired dataset to enable effective generalization to complex and unseen polygon shapes. PolyFit achieves impressive peg-in-hole success rates of 97.3% and 96.3% for seen and unseen shapes in simulations, respectively. Real-world evaluations further demonstrate substantial success rates of 86.7% and 85.0%, highlighting the robustness and adaptability of the proposed method.