 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmart Speech Segmentation using Acousto-Linguistic Features with look-ahead
Oct 27, 2022



Segmentation for continuous Automatic Speech Recognition (ASR) has traditionally used silence timeouts or voice activity detectors (VADs), which are both limited to acoustic features. This segmentation is often overly aggressive, given that people naturally pause to think as they speak. Consequently, segmentation happens mid-sentence, hindering both punctuation and downstream tasks like machine translation for which high-quality segmentation is critical. Model-based segmentation methods that leverage acoustic features are powerful, but without an understanding of the language itself, these approaches are limited. We present a hybrid approach that leverages both acoustic and language information to improve segmentation. Furthermore, we show that including one word as a look-ahead boosts segmentation quality. On average, our models improve segmentation-F0.5 score by 9.8% over baseline. We show that this approach works for multiple languages. For the downstream task of machine translation, it improves the translation BLEU score by an average of 1.05 points.
Behavioral Repertoires for Soft Tensegrity Robots
Sep 23, 2020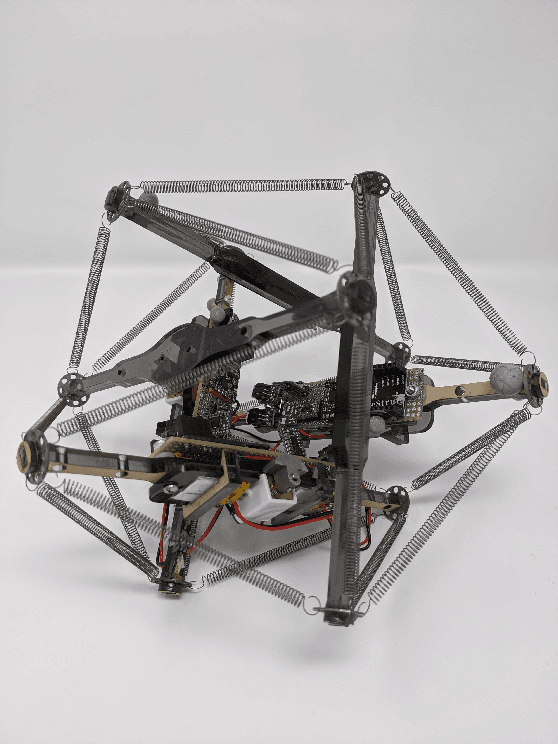
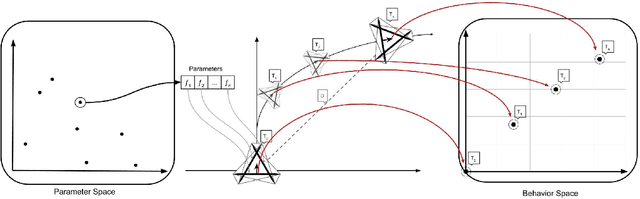
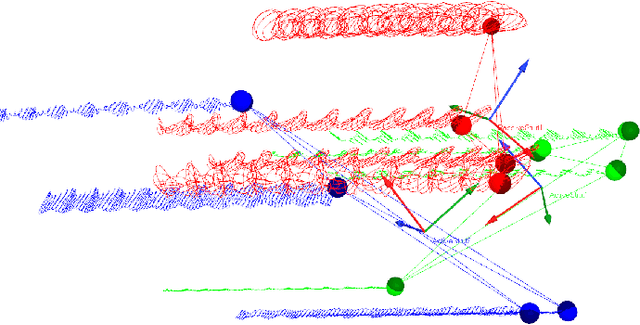
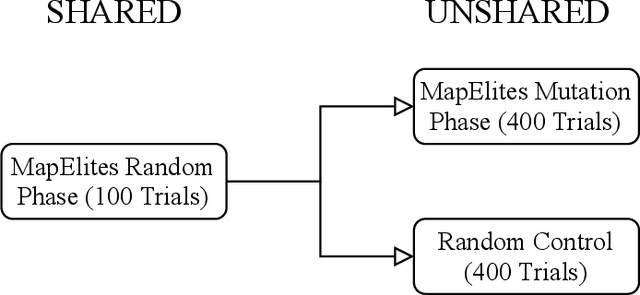
Mobile soft robots offer compelling applications in fields ranging from urban search and rescue to planetary exploration. A critical challenge of soft robotic control is that the nonlinear dynamics imposed by soft materials often result in complex behaviors that are counterintuitive and hard to model or predict. As a consequence, most behaviors for mobile soft robots are discovered through empirical trial and error and hand-tuning. A second challenge is that soft materials are difficult to simulate with high fidelity -- leading to a significant reality gap when trying to discover or optimize new behaviors. In this work we employ a Quality Diversity Algorithm running model-free on a physical soft tensegrity robot that autonomously generates a behavioral repertoire with no a priori knowledge of the robot dynamics, and minimal human intervention. The resulting behavior repertoire displays a diversity of unique locomotive gaits useful for a variety of tasks. These results help provide a road map for increasing the behavioral capabilities of mobile soft robots through real-world automation.