 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobustness for Free: Quality-Diversity Driven Discovery of Agile Soft Robotic Gaits
Nov 02, 2023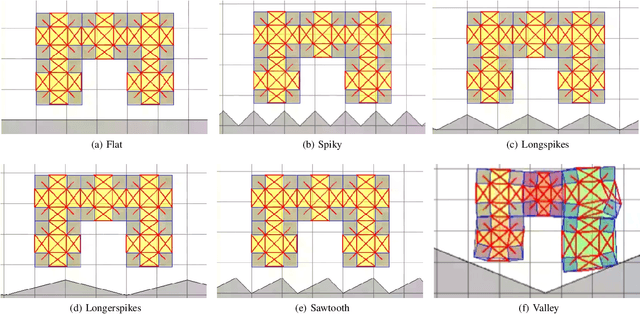
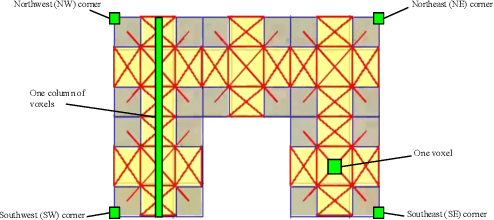
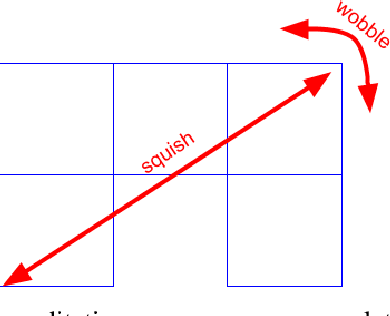
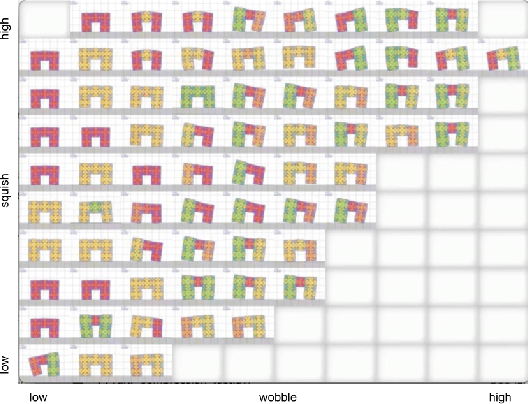
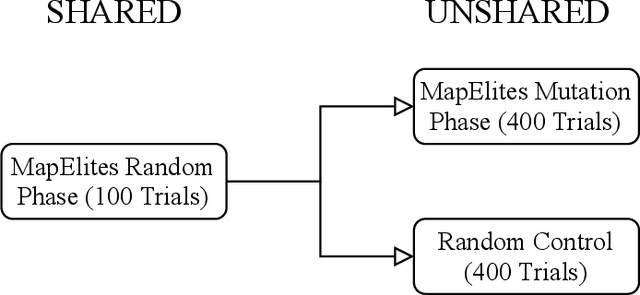
Soft robotics aims to develop robots able to adapt their behavior across a wide range of unstructured and unknown environments. A critical challenge of soft robotic control is that nonlinear dynamics often result in complex behaviors hard to model and predict. Typically behaviors for mobile soft robots are discovered through empirical trial and error and hand-tuning. More recently, optimization algorithms such as Genetic Algorithms (GA) have been used to discover gaits, but these behaviors are often optimized for a single environment or terrain, and can be brittle to unplanned changes to terrain. In this paper we demonstrate how Quality Diversity Algorithms, which search of a range of high-performing behaviors, can produce repertoires of gaits that are robust to changing terrains. This robustness significantly out-performs that of gaits produced by a single objective optimization algorithm.
GaitGraph: Graph Convolutional Network for Skeleton-Based Gait Recognition
Jan 27, 2021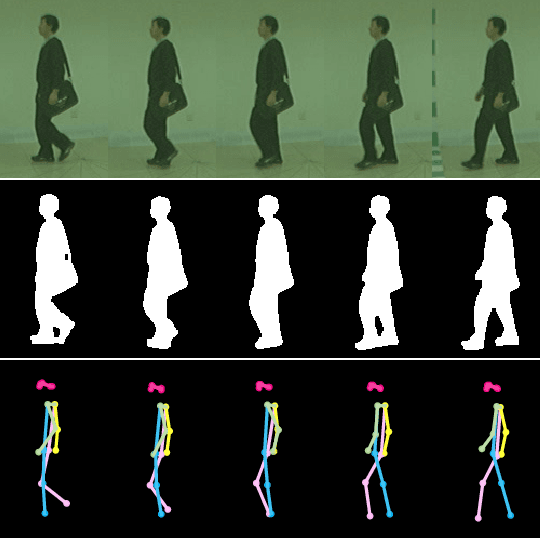
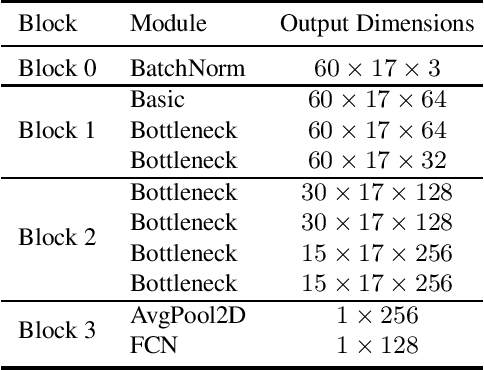
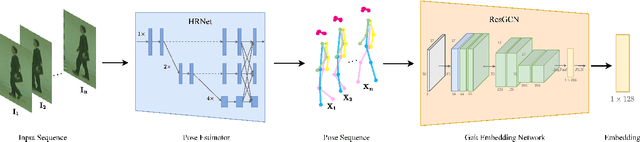
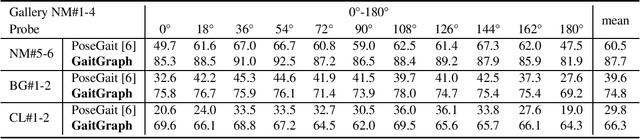
Gait recognition is a promising video-based biometric for identifying individual walking patterns from a long distance. At present, most gait recognition methods use silhouette images to represent a person in each frame. However, silhouette images can lose fine-grained spatial information, and most papers do not regard how to obtain these silhouettes in complex scenes. Furthermore, silhouette images contain not only gait features but also other visual clues that can be recognized. Hence these approaches can not be considered as strict gait recognition. We leverage recent advances in human pose estimation to estimate robust skeleton poses directly from RGB images to bring back model-based gait recognition with a cleaner representation of gait. Thus, we propose GaitGraph that combines skeleton poses with Graph Convolutional Network (GCN) to obtain a modern model-based approach for gait recognition. The main advantages are a cleaner, more elegant extraction of the gait features and the ability to incorporate powerful spatio-temporal modeling using GCN. Experiments on the popular CASIA-B gait dataset show that our method archives state-of-the-art performance in model-based gait recognition. The code and models are publicly available.
Behavioral Repertoires for Soft Tensegrity Robots
Sep 23, 2020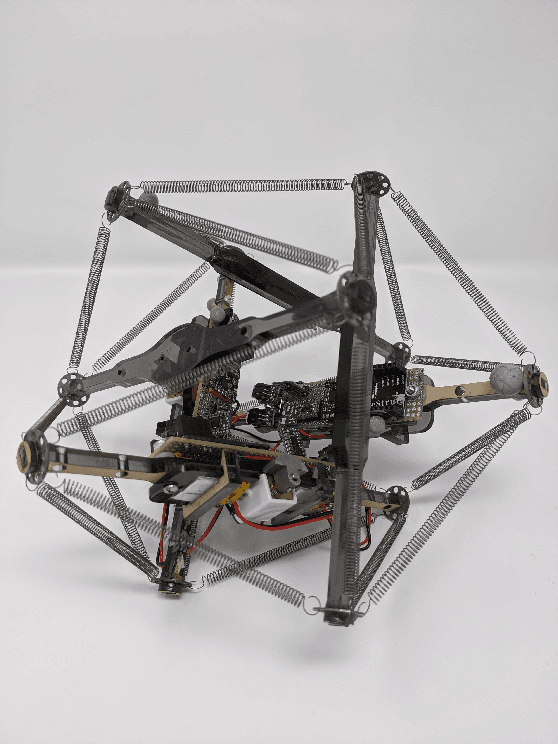
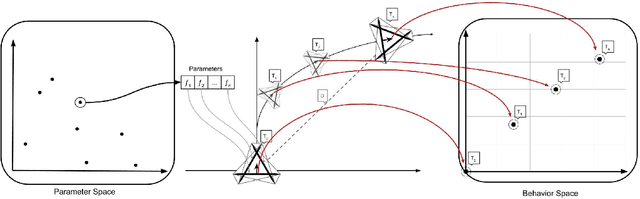
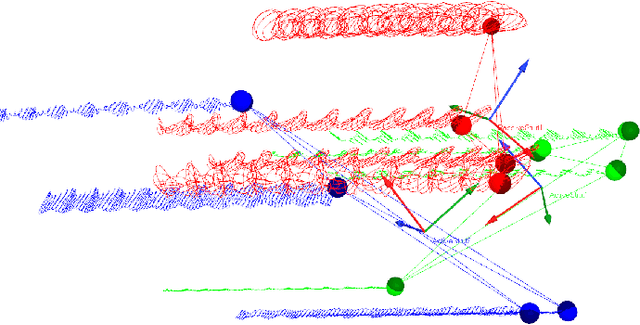
Mobile soft robots offer compelling applications in fields ranging from urban search and rescue to planetary exploration. A critical challenge of soft robotic control is that the nonlinear dynamics imposed by soft materials often result in complex behaviors that are counterintuitive and hard to model or predict. As a consequence, most behaviors for mobile soft robots are discovered through empirical trial and error and hand-tuning. A second challenge is that soft materials are difficult to simulate with high fidelity -- leading to a significant reality gap when trying to discover or optimize new behaviors. In this work we employ a Quality Diversity Algorithm running model-free on a physical soft tensegrity robot that autonomously generates a behavioral repertoire with no a priori knowledge of the robot dynamics, and minimal human intervention. The resulting behavior repertoire displays a diversity of unique locomotive gaits useful for a variety of tasks. These results help provide a road map for increasing the behavioral capabilities of mobile soft robots through real-world automation.