 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAs Language Models Scale, Low-order Linear Depth Dynamics Emerge
Mar 13, 2026Large language models are often viewed as high-dimensional nonlinear systems and treated as black boxes. Here, we show that transformer depth dynamics admit accurate low-order linear surrogates within context. Across tasks including toxicity, irony, hate speech and sentiment, a 32-dimensional linear surrogate reproduces the layerwise sensitivity profile of GPT-2-large with near-perfect agreement, capturing how the final output shifts under additive injections at each layer. We then uncover a surprising scaling principle: for a fixed-order linear surrogate, agreement with the full model improves monotonically with model size across the GPT-2 family. This linear surrogate also enables principled multi-layer interventions that require less energy than standard heuristic schedules when applied to the full model. Together, our results reveal that as language models scale, low-order linear depth dynamics emerge within contexts, offering a systems-theoretic foundation for analyzing and controlling them.
Total Variation Sparse Bayesian Learning for Block Sparsity via Majorization-Minimization
Feb 04, 2026Block sparsity is a widely exploited structure in sparse recovery, offering significant gains when signal blocks are known. Yet, practical signals often exhibit unknown block boundaries and isolated non-zero entries, which challenge traditional approaches. A promising method to handle such complex sparsity patterns is the difference-of-logs total variation (DoL-TV) regularized sparse Bayesian learning (SBL). However, due to the complex form of DoL-TV term, the resulting optimization problem is hard to solve. This paper develops a new optimization framework for the DoL-TV SBL cost function. By introducing an exponential reparameterization of the SBL hyperparameters, we reveal a novel structure that admits a majorization-minimization formulation and naturally extends to unknown noise variance estimation. Sparse recovery results on both synthetic data and extended source direction-of-arrival estimation demonstrate improved accuracy and runtime performance compared to benchmark methods.
An Energy-efficient Ordered Transmission-based Sequential Estimation
Apr 15, 2025Estimation problems in wireless sensor networks typically involve gathering and processing data from distributed sensors to infer the state of an environment at the fusion center. However, not all measurements contribute significantly to improving estimation accuracy. The ordered transmission protocol, a promising approach for enhancing energy efficiency in wireless networks, allows for the selection of measurements from different sensors to ensure the desired estimation quality. In this work, we use the idea of ordered transmission to reduce the number of transmissions required for sequential estimation within a network, thereby achieving energy-efficient estimation. We derive a new stopping rule that minimizes the number of transmissions while maintaining estimation accuracy similar to general sequential estimation with unordered transmissions. Moreover, we derive the expected number of transmissions required for both general sequential estimation with unordered transmissions and proposed sequential estimation with ordered transmissions and make a comparison between the two systems. Simulation results indicate that our proposed scheme can efficiently reduce transmissions while still ensuring the quality of estimation.
One-bit Compressed Sensing using Generative Models
Feb 18, 2025This paper addresses the classical problem of one-bit compressed sensing using a deep learning-based reconstruction algorithm that leverages a trained generative model to enhance the signal reconstruction performance. The generator, a pre-trained neural network, learns to map from a low-dimensional latent space to a higher-dimensional set of sparse vectors. This generator is then used to reconstruct sparse vectors from their one-bit measurements by searching over its range. The presented algorithm provides an excellent reconstruction performance because the generative model can learn additional structural information about the signal beyond sparsity. Furthermore, we provide theoretical guarantees on the reconstruction accuracy and sample complexity of the algorithm. Through numerical experiments using three publicly available image datasets, MNIST, Fashion-MNIST, and Omniglot, we demonstrate the superior performance of the algorithm compared to other existing algorithms and show that our algorithm can recover both the amplitude and the direction of the signal from one-bit measurements.
Efficient Off-Grid Bayesian Parameter Estimation for Kronecker-Structured Signals
Nov 30, 2024This work studies the problem of jointly estimating unknown parameters from Kronecker-structured multidimensional signals, which arises in applications like intelligent reflecting surface (IRS)-aided channel estimation. Exploiting the Kronecker structure, we decompose the estimation problem into smaller, independent subproblems across each dimension. Each subproblem is posed as a sparse recovery problem using basis expansion and solved using a novel off-grid sparse Bayesian learning (SBL)-based algorithm. Additionally, we derive probabilistic error bounds for the decomposition, quantify its denoising effect, and provide convergence analysis for off-grid SBL. Our simulations show that applying the algorithm to IRS-aided channel estimation improves accuracy and runtime compared to state-of-the-art methods through the low-complexity and denoising benefits of the decomposition step and the high-resolution estimation capabilities of off-grid SBL.
On the Restricted Isometry Property of Kronecker-structured Matrices
Sep 13, 2024


In this work, we study the restricted isometry property (RIP) of Kronecker-structured matrices, formed by the Kronecker product of two factor matrices. Previously, only upper and lower bounds on the restricted isometry constant (RIC) in terms of the RICs of the factor matrices were known. We derive a probabilistic measurement bound for the $s$th-order RIC. We show that the Kronecker product of two sub-Gaussian matrices satisfies RIP with high probability if the minimum number of rows among two matrices is $\mathcal{O}(s \ln \max\{N_1, N_2\})$. Here, $s$ is the sparsity level, and $N_1$ and $N_2$ are the number of columns in the matrices. We also present improved measurement bounds for the recovery of Kronecker-structured sparse vectors using Kronecker-structured measurement matrices. Finally, our analysis is further extended to the Kronecker product of more than two matrices.
Convergence of Expectation-Maximization Algorithm with Mixed-Integer Optimization
Jan 31, 2024The convergence of expectation-maximization (EM)-based algorithms typically requires continuity of the likelihood function with respect to all the unknown parameters (optimization variables). The requirement is not met when parameters comprise both discrete and continuous variables, making the convergence analysis nontrivial. This paper introduces a set of conditions that ensure the convergence of a specific class of EM algorithms that estimate a mixture of discrete and continuous parameters. Our results offer a new analysis technique for iterative algorithms that solve mixed-integer non-linear optimization problems. As a concrete example, we prove the convergence of the EM-based sparse Bayesian learning algorithm in [1] that estimates the state of a linear dynamical system with jointly sparse inputs and bursty missing observations. Our results establish that the algorithm in [1] converges to the set of stationary points of the maximum likelihood cost with respect to the continuous optimization variables.
Joint State and Input Estimation for Linear Dynamical Systems with Sparse Control
Dec 04, 2023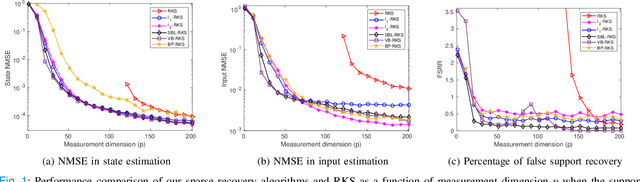

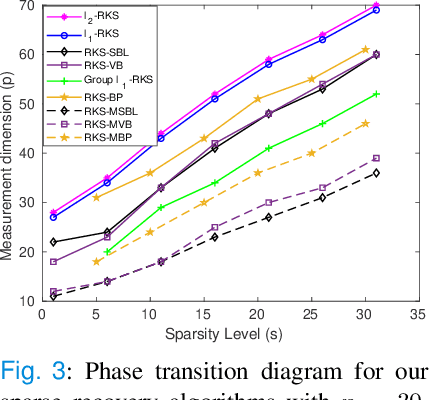

Sparsity constraints on the control inputs of a linear dynamical system naturally arise in several practical applications such as networked control, computer vision, seismic signal processing, and cyber-physical systems. In this work, we consider the problem of jointly estimating the states and sparse inputs of such systems from low-dimensional (compressive) measurements. Due to the low-dimensional measurements, conventional Kalman filtering and smoothing algorithms fail to accurately estimate the states and inputs. We present a Bayesian approach that exploits the input sparsity to significantly improve estimation accuracy. Sparsity in the input estimates is promoted by using different prior distributions on the input. We investigate two main approaches: regularizer-based MAP, and {Bayesian learning-based estimation}. We also extend the approaches to handle control inputs with common support and analyze the time and memory complexities of the presented algorithms. Finally, using numerical simulations, we show that our algorithms outperform the state-of-the-art methods in terms of accuracy and time/memory complexities, especially in the low-dimensional measurement regime.
Anomaly Detection via Learning-Based Sequential Controlled Sensing
Nov 30, 2023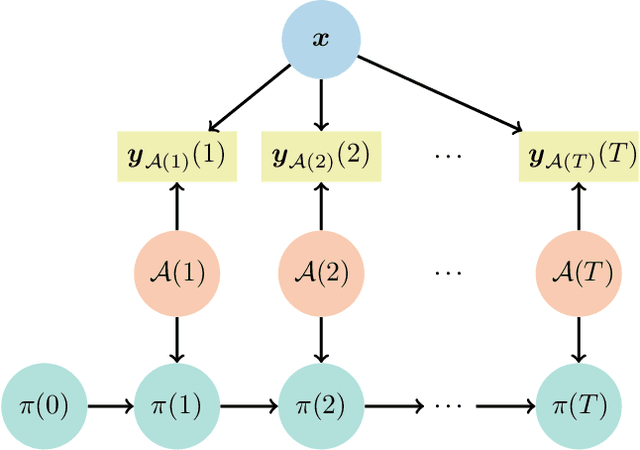
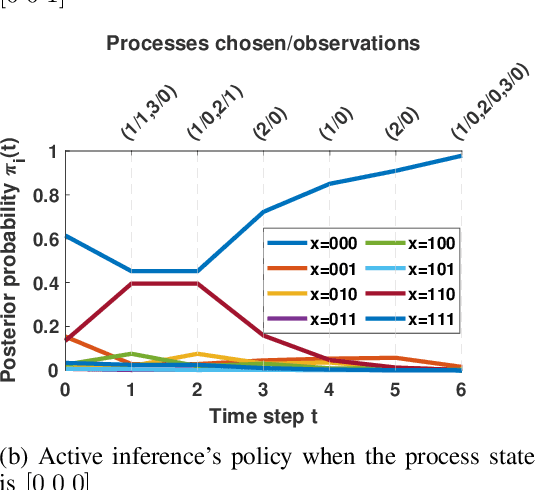

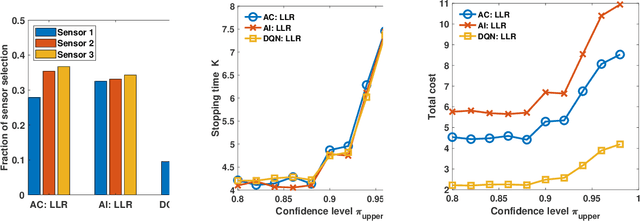
In this paper, we address the problem of detecting anomalies among a given set of binary processes via learning-based controlled sensing. Each process is parameterized by a binary random variable indicating whether the process is anomalous. To identify the anomalies, the decision-making agent is allowed to observe a subset of the processes at each time instant. Also, probing each process has an associated cost. Our objective is to design a sequential selection policy that dynamically determines which processes to observe at each time with the goal to minimize the delay in making the decision and the total sensing cost. We cast this problem as a sequential hypothesis testing problem within the framework of Markov decision processes. This formulation utilizes both a Bayesian log-likelihood ratio-based reward and an entropy-based reward. The problem is then solved using two approaches: 1) a deep reinforcement learning-based approach where we design both deep Q-learning and policy gradient actor-critic algorithms; and 2) a deep active inference-based approach. Using numerical experiments, we demonstrate the efficacy of our algorithms and show that our algorithms adapt to any unknown statistical dependence pattern of the processes.
Kronecker-structured Sparse Vector Recovery with Application to IRS-MIMO Channel Estimation
Oct 16, 2023



This paper studies the problem of Kronecker-structured sparse vector recovery from an underdetermined linear system with a Kronecker-structured dictionary. Such a problem arises in many real-world applications such as the sparse channel estimation of an intelligent reflecting surface-aided multiple-input multiple-output system. The prior art only exploits the Kronecker structure in the support of the sparse vector and solves the entire linear system together leading to high computational complexity. Instead, we break down the original sparse recovery problem into multiple independent sub-problems and solve them individually. We obtain the sparse vector as the Kronecker product of the individual solutions, retaining its structure in both support and nonzero entries. Our simulations demonstrate the superior performance of our methods in terms of accuracy and run time compared with the existing works, using synthetic data and the channel estimation application. We attribute the low run time to the reduced solution space due to the additional structure and improved accuracy to the denoising effect owing to the decomposition step.