 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Planning in Dynamic Environments: A Survey from Classical to Modern Methods
Jun 01, 2026Motion planning in dynamic environments requires robots to continuously adapt their paths in response to environmental changes for safe and uninterrupted navigation. While many surveys have reviewed planning in static settings, systematic reviews focused on dynamic environments remain limited. This paper presents a comprehensive survey of 138 works, primarily published between 2015 and 2025, spanning both classical and learning-based approaches. The motion planning methods are grouped into five categories based on the concepts of sampling, graph search, model predictive control, learning, and additional classical local planning approaches, including velocity obstacles, potential fields and dynamic windows. The learning techniques include supervised learning and reinforcement learning. We also discuss the role of dynamic perception in motion planning, covering techniques for detecting and modeling moving obstacles using cameras, LiDAR, and event-based sensors. The survey analyzes the principles, strengths, and limitations of each method, with particular attention to challenges unique to dynamic environments, such as prediction uncertainty, human-robot interaction, and the freezing robot problem. The survey provides researchers with a structured understanding of motion planning methods in dynamic environments.
SimInsert: Seamless Video Object Insertion via Regional Sparse Attention Fusion
May 22, 2026Video object insertion requires ensuring spatio-temporal coherence and interactive realism, extending far beyond simple content placement. However, current approaches are often hindered by a reliance on explicit motion engineering or resource-intensive retraining, restricting their flexibility and generalization. To bridge this gap, we present \textit{SimInsert}, a training-free paradigm that efficiently decouples the task into intuitive single-frame editing and semantic motion description. By harnessing the robust generative priors of image-to-video diffusion models, SimInsert propagates edits temporally, strictly preserving background invariance while enabling plausible, text-driven interactions between the inserted object and the dynamic environment. Our approach hinges on non-invasive guidance mechanisms that enforce structural consistency, facilitate seamless boundary fusion, and counteract the fidelity drift that typically accumulates during the denoising trajectory. Extensive quantitative experiments validate our efficacy: SimInsert surpasses state-of-the-art methods with an 18.8\% gain in PSNR, 20.1\% in SSIM, and a 44.1\% decrease in LPIPS, offering a streamlined solution for high-fidelity video editing.
L1 Adaptive Resonance Ratio Control for Series Elastic Actuator with Guaranteed Transient Performance
May 25, 2023



To eliminate the static error, overshoot, and vibration of the series elastic actuator (SEA) position control, the resonance ratio control (RRC) algorithm is improved based on L1 adaptive control(L1AC)method. Based on the analysis of the factors affecting the control performance of SEA, the algorithm schema is proposed, the stability is proved, and the main control parameters are analyzed. The algorithm schema is further improved with gravity compensation, and the predicted error and reference error is reduced to guarantee transient performance. Finally, the effectiveness of the algorithm is validated by simulation and platform experiments. The simulation and experiment results show that the algorithm has good adaptability, can improve transient control performance, and can handle effectively the static error, overshoot, and vibration. In addition, when a link-side collision occurs, the algorithm automatically reduces the link speed and limits the motor current, thus protecting the humans and SEA itself, due to the low pass filter characterization of L1AC to disturbance.
LCAUnet: A skin lesion segmentation network with enhanced edge and body fusion
May 01, 2023Accurate segmentation of skin lesions in dermatoscopic images is crucial for the early diagnosis of skin cancer and improving the survival rate of patients. However, it is still a challenging task due to the irregularity of lesion areas, the fuzziness of boundaries, and other complex interference factors. In this paper, a novel LCAUnet is proposed to improve the ability of complementary representation with fusion of edge and body features, which are often paid little attentions in traditional methods. First, two separate branches are set for edge and body segmentation with CNNs and Transformer based architecture respectively. Then, LCAF module is utilized to fuse feature maps of edge and body of the same level by local cross-attention operation in encoder stage. Furthermore, PGMF module is embedded for feature integration with prior guided multi-scale adaption. Comprehensive experiments on public available dataset ISIC 2017, ISIC 2018, and PH2 demonstrate that LCAUnet outperforms most state-of-the-art methods. The ablation studies also verify the effectiveness of the proposed fusion techniques.
Computational imaging with the human brain
Oct 07, 2022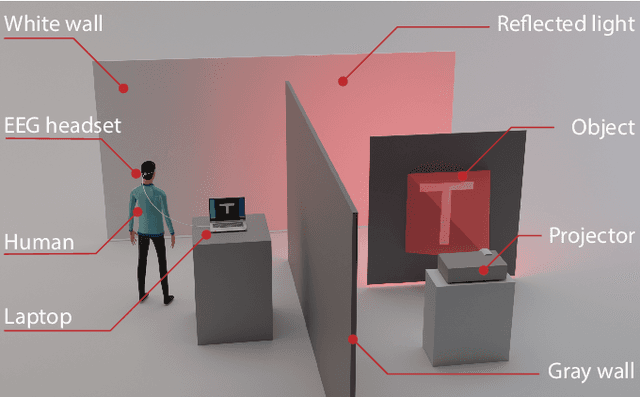
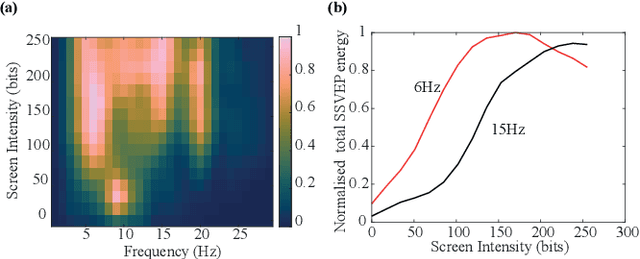
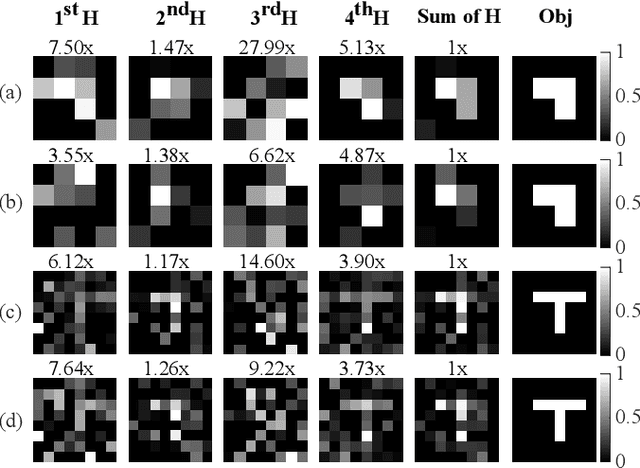
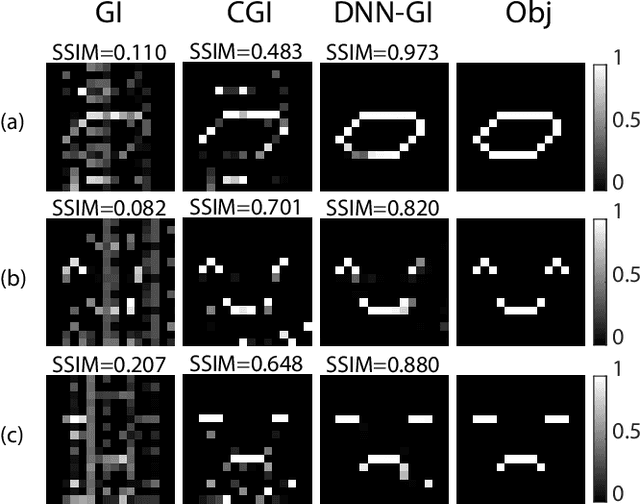
Brain-computer interfaces (BCIs) are enabling a range of new possibilities and routes for augmenting human capability. Here, we propose BCIs as a route towards forms of computation, i.e. computational imaging, that blend the brain with external silicon processing. We demonstrate ghost imaging of a hidden scene using the human visual system that is combined with an adaptive computational imaging scheme. This is achieved through a projection pattern `carving' technique that relies on real-time feedback from the brain to modify patterns at the light projector, thus enabling more efficient and higher resolution imaging. This brain-computer connectivity demonstrates a form of augmented human computation that could in the future extend the sensing range of human vision and provide new approaches to the study of the neurophysics of human perception. As an example, we illustrate a simple experiment whereby image reconstruction quality is affected by simultaneous conscious processing and readout of the perceived light intensities.
Enhancing Model Interpretability and Accuracy for Disease Progression Prediction via Phenotype-Based Patient Similarity Learning
Sep 26, 2019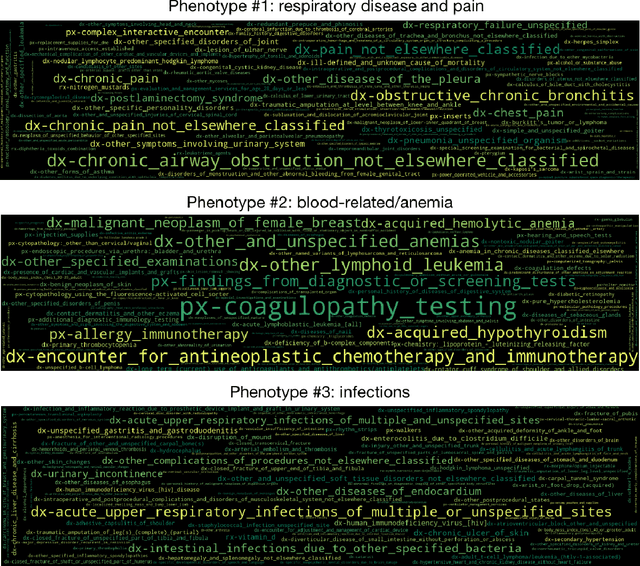
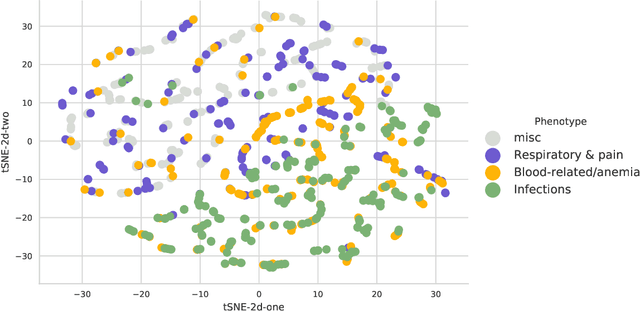
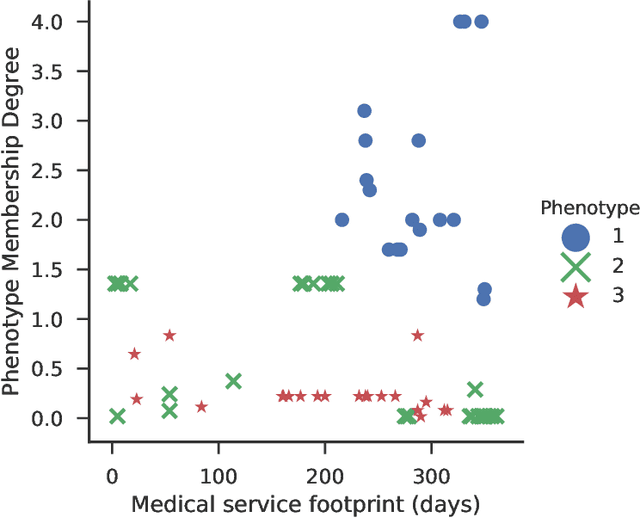

Models have been proposed to extract temporal patterns from longitudinal electronic health records (EHR) for clinical predictive models. However, the common relations among patients (e.g., receiving the same medical treatments) were rarely considered. In this paper, we propose to learn patient similarity features as phenotypes from the aggregated patient-medical service matrix using non-negative matrix factorization. On real-world medical claim data, we show that the learned phenotypes are coherent within each group, and also explanatory and indicative of targeted diseases. We conducted experiments to predict the diagnoses for Chronic Lymphocytic Leukemia (CLL) patients. Results show that the phenotype-based similarity features can improve prediction over multiple baselines, including logistic regression, random forest, convolutional neural network, and more.