 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGWRBoost:A geographically weighted gradient boosting method for explainable quantification of spatially-varying relationships
Dec 15, 2022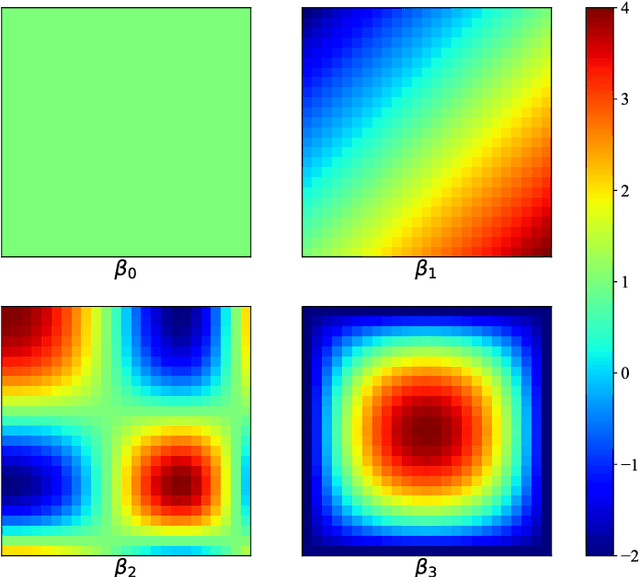



The geographically weighted regression (GWR) is an essential tool for estimating the spatial variation of relationships between dependent and independent variables in geographical contexts. However, GWR suffers from the problem that classical linear regressions, which compose the GWR model, are more prone to be underfitting, especially for significant volume and complex nonlinear data, causing inferior comparative performance. Nevertheless, some advanced models, such as the decision tree and the support vector machine, can learn features from complex data more effectively while they cannot provide explainable quantification for the spatial variation of localized relationships. To address the above issues, we propose a geographically gradient boosting weighted regression model, GWRBoost, that applies the localized additive model and gradient boosting optimization method to alleviate underfitting problems and retains explainable quantification capability for spatially-varying relationships between geographically located variables. Furthermore, we formulate the computation method of the Akaike information score for the proposed model to conduct the comparative analysis with the classic GWR algorithm. Simulation experiments and the empirical case study are applied to prove the efficient performance and practical value of GWRBoost. The results show that our proposed model can reduce the RMSE by 18.3% in parameter estimation accuracy and AICc by 67.3% in the goodness of fit.
DouFu: A Double Fusion Joint Learning Method For Driving Trajectory Representation
May 05, 2022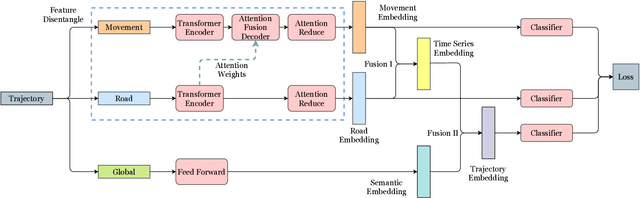
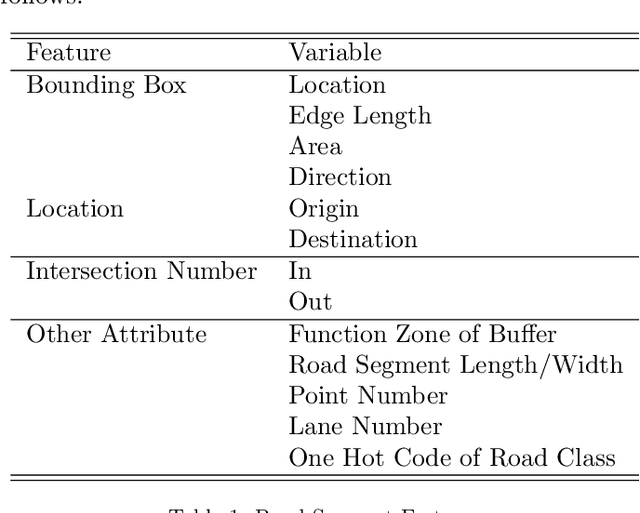
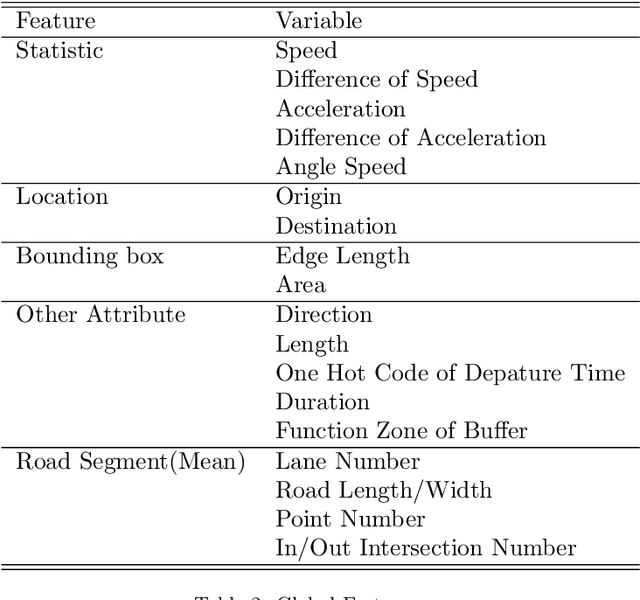
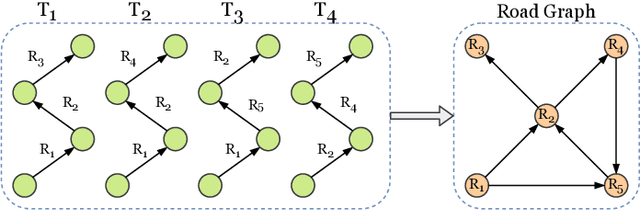
Driving trajectory representation learning is of great significance for various location-based services, such as driving pattern mining and route recommendation. However, previous representation generation approaches tend to rarely address three challenges: 1) how to represent the intricate semantic intentions of mobility inexpensively; 2) complex and weak spatial-temporal dependencies due to the sparsity and heterogeneity of the trajectory data; 3) route selection preferences and their correlation to driving behavior. In this paper, we propose a novel multimodal fusion model, DouFu, for trajectory representation joint learning, which applies multimodal learning and attention fusion module to capture the internal characteristics of trajectories. We first design movement, route, and global features generated from the trajectory data and urban functional zones and then analyze them respectively with the attention encoder or feed forward network. The attention fusion module incorporates route features with movement features to create a better spatial-temporal embedding. With the global semantic feature, DouFu produces a comprehensive embedding for each trajectory. We evaluate representations generated by our method and other baseline models on classification and clustering tasks. Empirical results show that DouFu outperforms other models in most of the learning algorithms like the linear regression and the support vector machine by more than 10%.