 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Active Object Recognition and 6D Pose Estimation from Multimodal Contact Sensing
Mar 22, 2026We present an active tactile exploration framework for joint object recognition and 6D pose estimation. The proposed method integrates wrist force/torque sensing, GelSight tactile sensing, and free-space constraints within a Bayesian inference framework that maintains a belief over object class and pose during active tactile exploration. By combining contact and non-contact evidence, the framework reduces ambiguity and improves robustness in the joint class-pose estimation problem. To enable efficient inference in the large hypothesis space, we employ a customized particle filter that progressively samples particles based on new observations. The inferred belief is further used to guide active exploration by selecting informative next touches under reachability constraints. For effective data collection, a motion planning and control framework is developed to plan and execute feasible paths for tactile exploration, handle unexpected contacts and GelSight-surface alignment with tactile servoing. We evaluate the framework in simulation and on a Franka Panda robot using 11 YCB objects. Results show that incorporating tactile and free-space information substantially improves recognition and pose estimation accuracy and stability, while reducing the number of action cycles compared with force/torque-only baselines. Code, dataset, and supplementary material will be made available online.
Multifingered force-aware control for humanoid robots
Mar 09, 2026In this paper, we address force-aware control and force distribution in robotic platforms with multi-fingered hands. Given a target goal and force estimates from tactile sensors, we design a controller that adapts the motion of the torso, arm, wrist, and fingers, redistributing forces to maintain stable contact with objects of varying mass distribution or unstable contacts. To estimate forces, we collect a dataset of tactile signals and ground-truth force measurements using five Xela magnetic sensors interacting with indenters, and train force estimators. We then introduce a model-based control scheme that minimizes the distance between the Center of Pressure (CoP) and the centroid of the fingertips contact polygon. Since our method relies on estimated forces rather than raw tactile signals, it has the potential to be applied to any sensor capable of force estimation. We validate our framework on a balancing task with five objects, achieving a $82.7\%$ success rate, and further evaluate it in multi-object scenarios, achieving $80\%$ accuracy. Code and data can be found here https://github.com/hsp-iit/multifingered-force-aware-control.
Extremum Seeking Controlled Wiggling for Tactile Insertion
Oct 03, 2024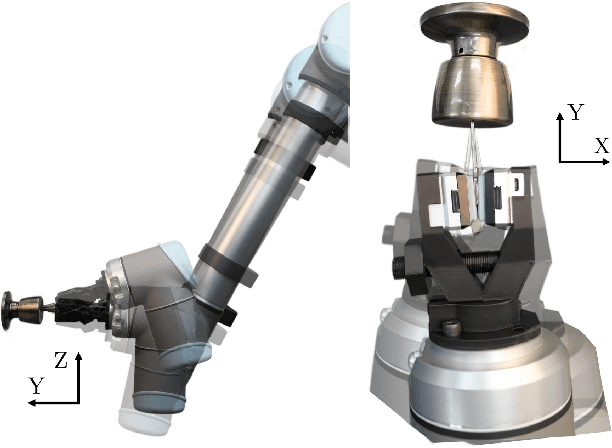
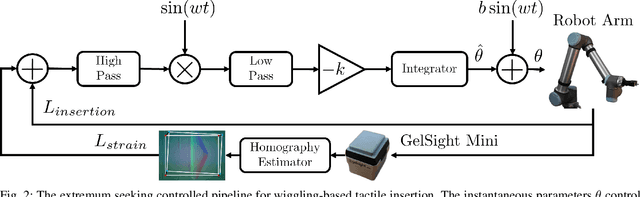
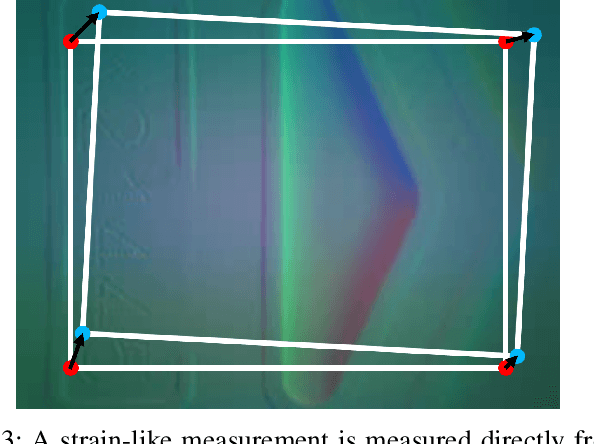
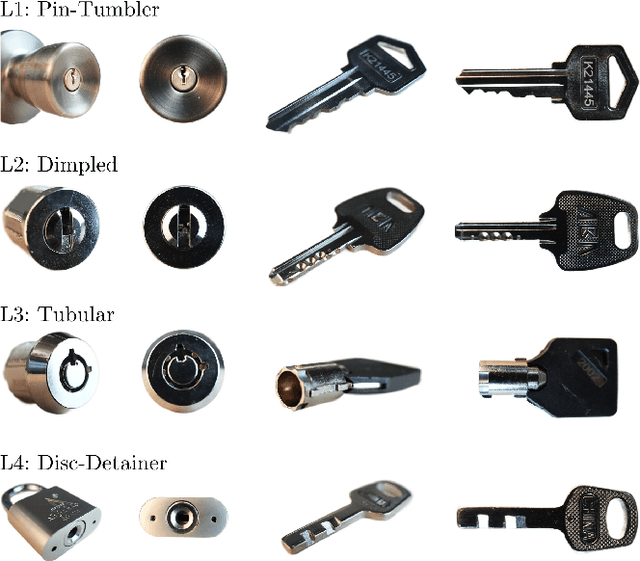
When humans perform insertion tasks such as inserting a cup into a cupboard, routing a cable, or key insertion, they wiggle the object and observe the process through tactile and proprioceptive feedback. While recent advances in tactile sensors have resulted in tactile-based approaches, there has not been a generalized formulation based on wiggling similar to human behavior. Thus, we propose an extremum-seeking control law that can insert four keys into four types of locks without control parameter tuning despite significant variation in lock type. The resulting model-free formulation wiggles the end effector pose to maximize insertion depth while minimizing strain as measured by a GelSight Mini tactile sensor that grasps a key. The algorithm achieves a 71\% success rate over 120 randomly initialized trials with uncertainty in both translation and orientation. Over 240 deterministically initialized trials, where only one translation or rotation parameter is perturbed, 84\% of trials succeeded. Given tactile feedback at 13 Hz, the mean insertion time for these groups of trials are 262 and 147 seconds respectively.
Sim2Real Bilevel Adaptation for Object Surface Classification using Vision-Based Tactile Sensors
Nov 02, 2023



In this paper, we address the Sim2Real gap in the field of vision-based tactile sensors for classifying object surfaces. We train a Diffusion Model to bridge this gap using a relatively small dataset of real-world images randomly collected from unlabeled everyday objects via the DIGIT sensor. Subsequently, we employ a simulator to generate images by uniformly sampling the surface of objects from the YCB Model Set. These simulated images are then translated into the real domain using the Diffusion Model and automatically labeled to train a classifier. During this training, we further align features of the two domains using an adversarial procedure. Our evaluation is conducted on a dataset of tactile images obtained from a set of ten 3D printed YCB objects. The results reveal a total accuracy of 81.9%, a significant improvement compared to the 34.7% achieved by the classifier trained solely on simulated images. This demonstrates the effectiveness of our approach. We further validate our approach using the classifier on a 6D object pose estimation task from tactile data.
Collision-aware In-hand 6D Object Pose Estimation using Multiple Vision-based Tactile Sensors
Jan 31, 2023



In this paper, we address the problem of estimating the in-hand 6D pose of an object in contact with multiple vision-based tactile sensors. We reason on the possible spatial configurations of the sensors along the object surface. Specifically, we filter contact hypotheses using geometric reasoning and a Convolutional Neural Network (CNN), trained on simulated object-agnostic images, to promote those that better comply with the actual tactile images from the sensors. We use the selected sensors configurations to optimize over the space of 6D poses using a Gradient Descent-based approach. We finally rank the obtained poses by penalizing those that are in collision with the sensors. We carry out experiments in simulation using the DIGIT vision-based sensor with several objects, from the standard YCB model set. The results demonstrate that our approach estimates object poses that are compatible with actual object-sensor contacts in $87.5\%$ of cases while reaching an average positional error in the order of $2$ centimeters. Our analysis also includes qualitative results of experiments with a real DIGIT sensor.