 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLooping LOCI: Developing Object Permanence from Videos
Oct 16, 2023Recent compositional scene representation learning models have become remarkably good in segmenting and tracking distinct objects within visual scenes. Yet, many of these models require that objects are continuously, at least partially, visible. Moreover, they tend to fail on intuitive physics tests, which infants learn to solve over the first months of their life. Our goal is to advance compositional scene representation algorithms with an embedded algorithm that fosters the progressive learning of intuitive physics, akin to infant development. As a fundamental component for such an algorithm, we introduce Loci-Looped, which advances a recently published unsupervised object location, identification, and tracking neural network architecture (Loci, Traub et al., ICLR 2023) with an internal processing loop. The loop is designed to adaptively blend pixel-space information with anticipations yielding information-fused activities as percepts. Moreover, it is designed to learn compositional representations of both individual object dynamics and between-objects interaction dynamics. We show that Loci-Looped learns to track objects through extended periods of object occlusions, indeed simulating their hidden trajectories and anticipating their reappearance, without the need for an explicit history buffer. We even find that Loci-Looped surpasses state-of-the-art models on the ADEPT and the CLEVRER dataset, when confronted with object occlusions or temporary sensory data interruptions. This indicates that Loci-Looped is able to learn the physical concepts of object permanence and inertia in a fully unsupervised emergent manner. We believe that even further architectural advancements of the internal loop - also in other compositional scene representation learning models - can be developed in the near future.
Loci-Segmented: Improving Scene Segmentation Learning
Oct 16, 2023
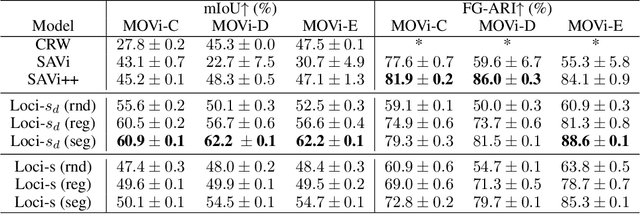


Slot-oriented processing approaches for compositional scene representation have recently undergone a tremendous development. We present Loci-Segmented (Loci-s), an advanced scene segmentation neural network that extends the slot-based location and identity tracking architecture Loci (Traub et al., ICLR 2023). The main advancements are (i) the addition of a pre-trained dynamic background module; (ii) a hyper-convolution encoder module, which enables object-focused bottom-up processing; and (iii) a cascaded decoder module, which successively generates object masks, masked depth maps, and masked, depth-map-informed RGB reconstructions. The background module features the learning of both a foreground identifying module and a background re-generator. We further improve performance via (a) the integration of depth information as well as improved slot assignments via (b) slot-location-entity regularization and (b) a prior segmentation network. Even without these latter improvements, the results reveal superior segmentation performance in the MOVi datasets and in another established dataset collection. With all improvements, Loci-s achieves a 32% better intersection over union (IoU) score in MOVi-E than the previous best. We furthermore show that Loci-s generates well-interpretable latent representations. We believe that these representations may serve as a foundation-model-like interpretable basis for solving downstream tasks, such as grounding language and context- and goal-conditioned event processing.
Boosting human decision-making with AI-generated decision aids
Mar 05, 2022
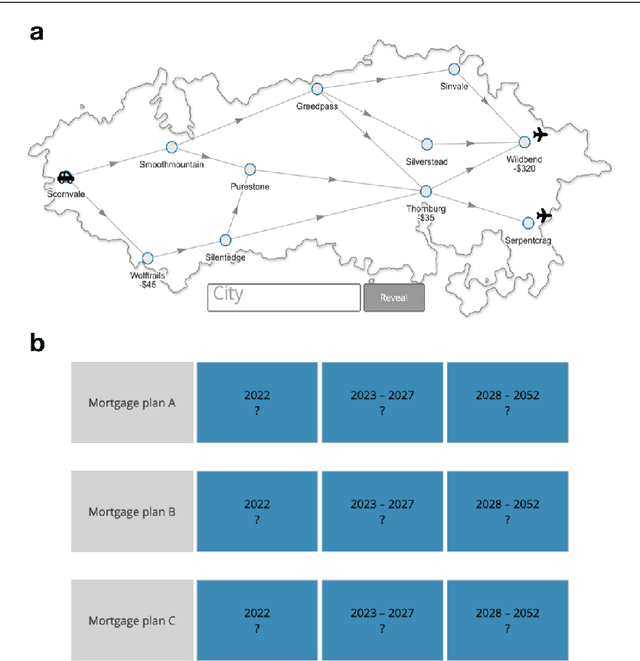
Human decision-making is plagued by many systematic errors. Many of these errors can be avoided by providing decision aids that guide decision-makers to attend to the important information and integrate it according to a rational decision strategy. Designing such decision aids is a tedious manual process. Advances in cognitive science might make it possible to automate this process in the future. We recently introduced machine learning methods for discovering optimal strategies for human decision-making automatically and an automatic method for explaining those strategies to people. Decision aids constructed by this method were able to improve human decision-making. However, following the descriptions generated by this method is very tedious. We hypothesized that this problem can be overcome by conveying the automatically discovered decision strategy as a series of natural language instructions for how to reach a decision. Experiment 1 showed that people do indeed understand such procedural instructions more easily than the decision aids generated by our previous method. Encouraged by this finding, we developed an algorithm for translating the output of our previous method into procedural instructions. We applied the improved method to automatically generate decision aids for a naturalistic planning task (i.e., planning a road trip) and a naturalistic decision task (i.e., choosing a mortgage). Experiment 2 showed that these automatically generated decision-aids significantly improved people's performance in planning a road trip and choosing a mortgage. These findings suggest that AI-powered boosting has potential for improving human decision-making in the real world.
Automatic Discovery of Interpretable Planning Strategies
May 24, 2020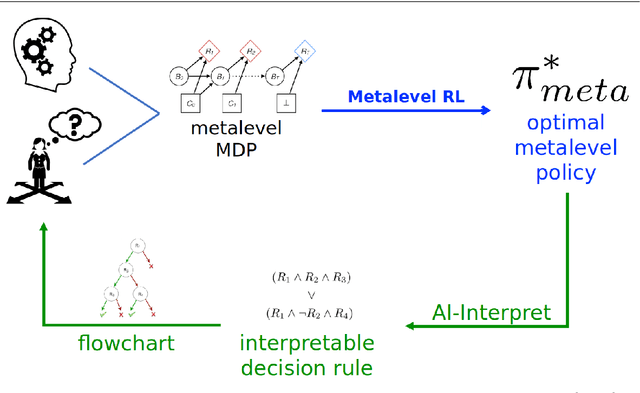
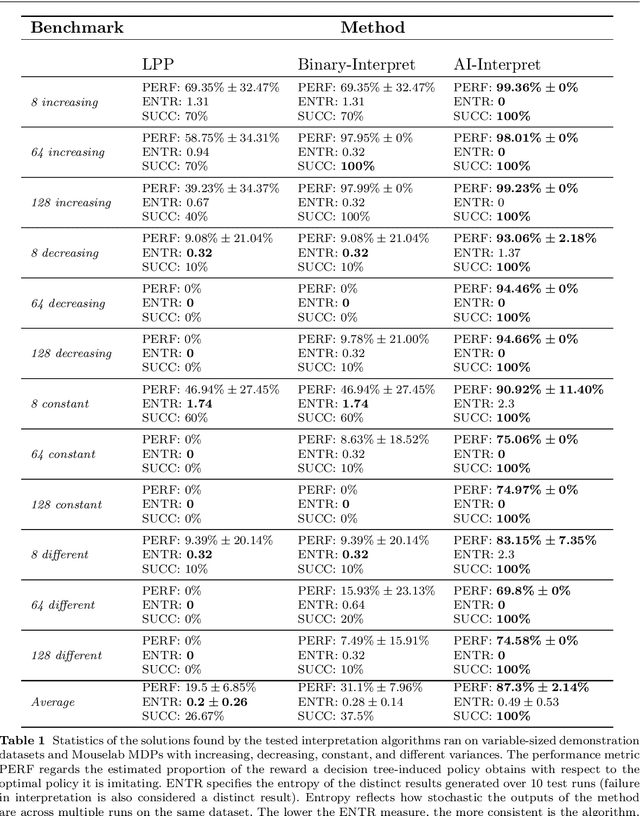
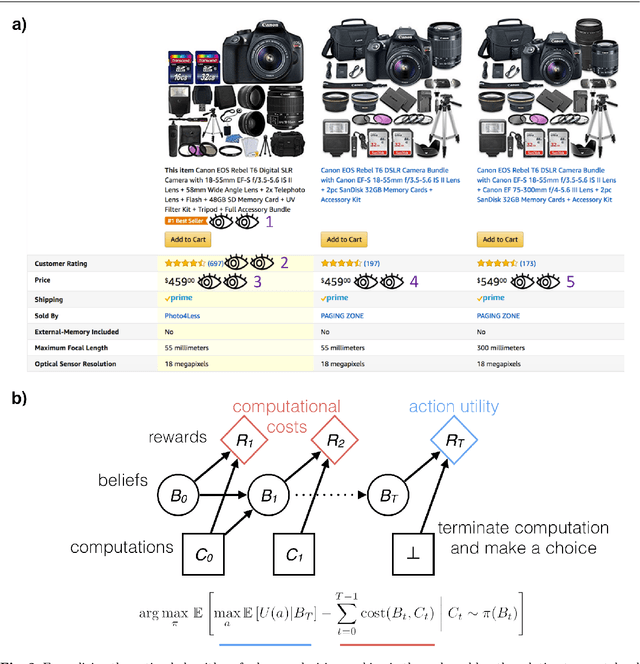
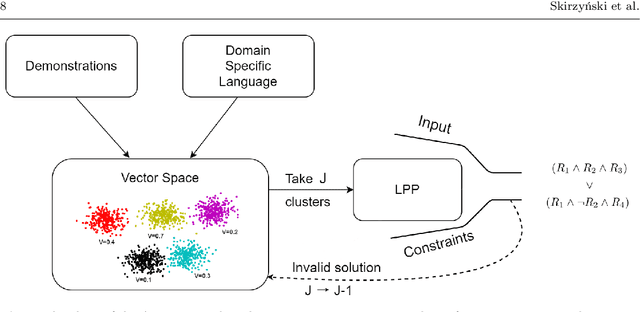
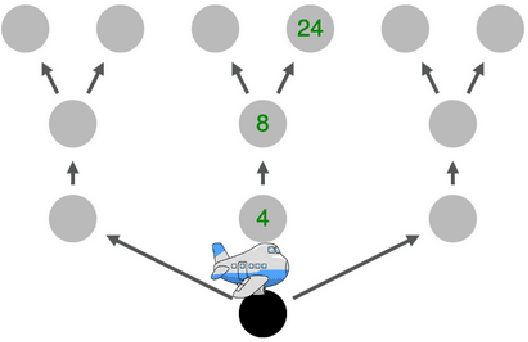
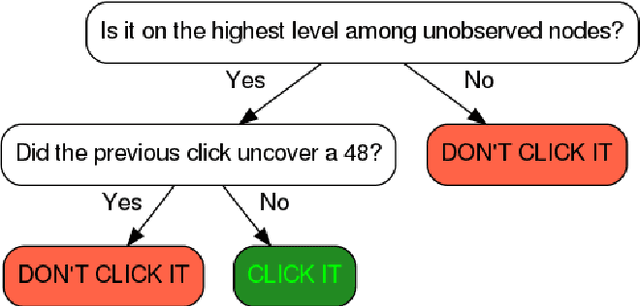
When making decisions, people often overlook critical information or are overly swayed by irrelevant information. A common approach to mitigate these biases is to provide decision-makers, especially professionals such as medical doctors, with decision aids, such as decision trees and flowcharts. Designing effective decision aids is a difficult problem. We propose that recently developed reinforcement learning methods for discovering clever heuristics for good decision-making can be partially leveraged to assist human experts in this design process. One of the biggest remaining obstacles to leveraging the aforementioned methods for improving human decision-making is that the policies they learn are opaque to people. To solve this problem, we introduce AI-Interpret: a general method for transforming idiosyncratic policies into simple and interpretable descriptions. Our algorithm combines recent advances in imitation learning and program induction with a new clustering method for identifying a large subset of demonstrations that can be accurately described by a simple, high-performing decision rule. We evaluate our new AI-Interpret algorithm and employ it to translate information-acquisition policies discovered through metalevel reinforcement learning. The results of three large behavioral experiments showed that the provision of decision rules as flowcharts significantly improved people's planning strategies and decisions across three different classes of sequential decision problems. Furthermore, a series of ablation studies confirmed that our AI-Interpret algorithm was critical to the discovery of interpretable decision rules and that it is ready to be applied to other reinforcement learning problems. We conclude that the methods and findings presented in this article are an important step towards leveraging automatic strategy discovery to improve human decision-making.