 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Light Spheres for Implicit Image Stitching and View Synthesis
Sep 26, 2024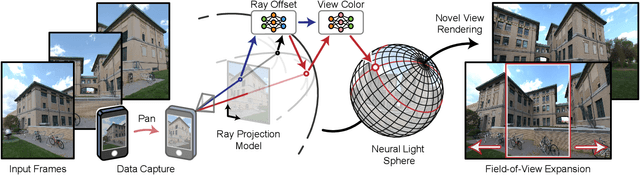
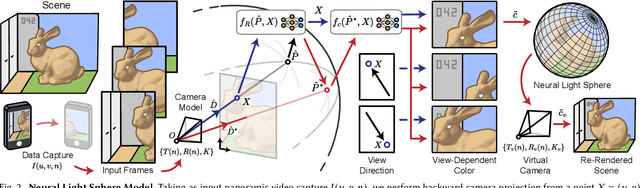
Challenging to capture, and challenging to display on a cellphone screen, the panorama paradoxically remains both a staple and underused feature of modern mobile camera applications. In this work we address both of these challenges with a spherical neural light field model for implicit panoramic image stitching and re-rendering; able to accommodate for depth parallax, view-dependent lighting, and local scene motion and color changes during capture. Fit during test-time to an arbitrary path panoramic video capture -- vertical, horizontal, random-walk -- these neural light spheres jointly estimate the camera path and a high-resolution scene reconstruction to produce novel wide field-of-view projections of the environment. Our single-layer model avoids expensive volumetric sampling, and decomposes the scene into compact view-dependent ray offset and color components, with a total model size of 80 MB per scene, and real-time (50 FPS) rendering at 1080p resolution. We demonstrate improved reconstruction quality over traditional image stitching and radiance field methods, with significantly higher tolerance to scene motion and non-ideal capture settings.
Cross-Camera Convolutional Color Constancy
Nov 24, 2020
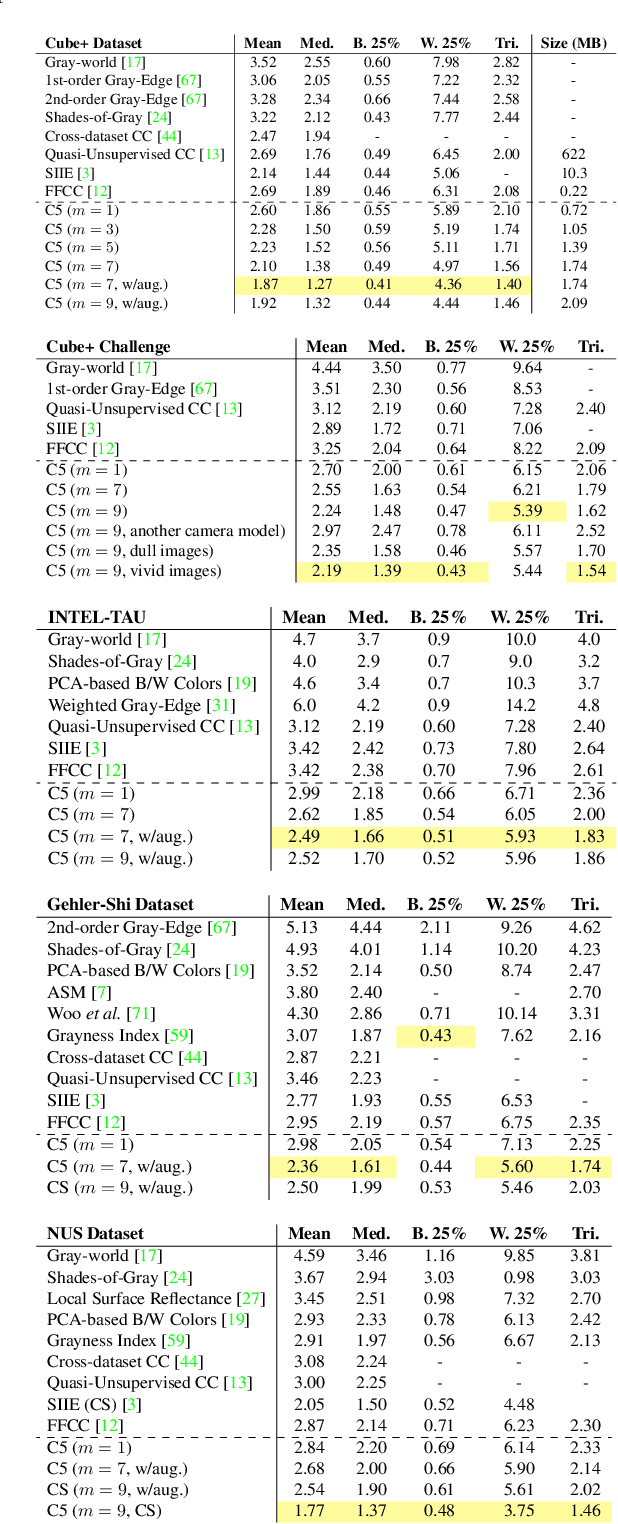
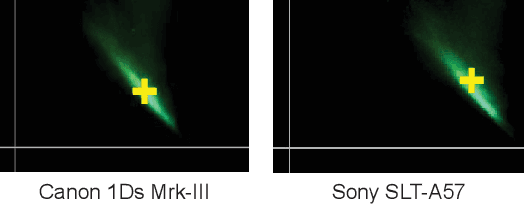

We present "Cross-Camera Convolutional Color Constancy" (C5), a learning-based method, trained on images from multiple cameras, that accurately estimates a scene's illuminant color from raw images captured by a new camera previously unseen during training. C5 is a hypernetwork-like extension of the convolutional color constancy (CCC) approach: C5 learns to generate the weights of a CCC model that is then evaluated on the input image, with the CCC weights dynamically adapted to different input content. Unlike prior cross-camera color constancy models, which are usually designed to be agnostic to the spectral properties of test-set images from unobserved cameras, C5 approaches this problem through the lens of transductive inference: additional unlabeled images are provided as input to the model at test time, which allows the model to calibrate itself to the spectral properties of the test-set camera during inference. C5 achieves state-of-the-art accuracy for cross-camera color constancy on several datasets, is fast to evaluate (~7 and ~90 ms per image on a GPU or CPU, respectively), and requires little memory (~2 MB), and, thus, is a practical solution to the problem of calibration-free automatic white balance for mobile photography.