 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
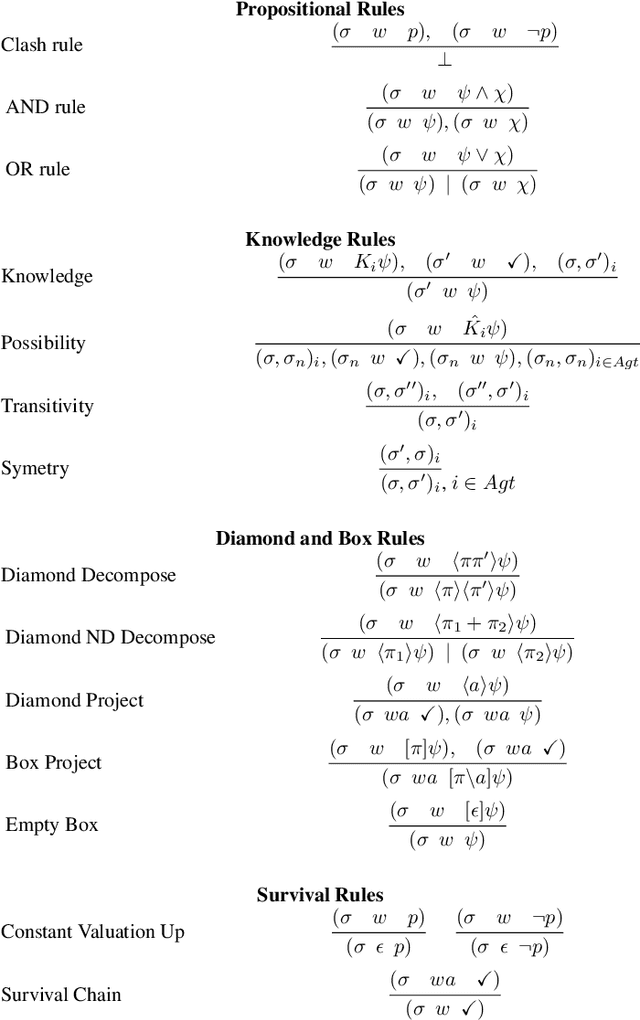
Add to EdgeQiana: A First-Order Formalism to Quantify over Contexts and Formulas with Temporality
Apr 02, 2026We introduce Qiana, a logic framework for reasoning on formulas that are true only in specific contexts. In Qiana, it is possible to quantify over both formulas and contexts to express, e.g., that ``everyone knows everything Alice says''. Qiana also permits paraconsistent logics within contexts, so that contexts can contain contradictions. Furthermore, Qiana is based on first-order logic, and is finitely axiomatizable, so that Qiana theories are compatible with pre-existing first-order logic theorem provers. We show how Qiana can be used to represent temporality, event calculus, and modal logic. We also discuss different design alternatives of Qiana.
Verifying Graph Neural Networks with Readout is Intractable
Oct 09, 2025



We introduce a logical language for reasoning about quantized aggregate-combine graph neural networks with global readout (ACR-GNNs). We provide a logical characterization and use it to prove that verification tasks for quantized GNNs with readout are (co)NEXPTIME-complete. This result implies that the verification of quantized GNNs is computationally intractable, prompting substantial research efforts toward ensuring the safety of GNN-based systems. We also experimentally demonstrate that quantized ACR-GNN models are lightweight while maintaining good accuracy and generalization capabilities with respect to non-quantized models.
Verifying Quantized Graph Neural Networks is PSPACE-complete
Feb 22, 2025



In this paper, we investigate verification of quantized Graph Neural Networks (GNNs), where some fixed-width arithmetic is used to represent numbers. We introduce the linear-constrained validity (LVP) problem for verifying GNNs properties, and provide an efficient translation from LVP instances into a logical language. We show that LVP is in PSPACE, for any reasonable activation functions. We provide a proof system. We also prove PSPACE-hardness, indicating that while reasoning about quantized GNNs is feasible, it remains generally computationally challenging.
A Computationally Grounded Framework for Cognitive Attitudes (extended version)
Dec 18, 2024


We introduce a novel language for reasoning about agents' cognitive attitudes of both epistemic and motivational type. We interpret it by means of a computationally grounded semantics using belief bases. Our language includes five types of modal operators for implicit belief, complete attraction, complete repulsion, realistic attraction and realistic repulsion. We give an axiomatization and show that our operators are not mutually expressible and that they can be combined to represent a large variety of psychological concepts including ambivalence, indifference, being motivated, being demotivated and preference. We present a dynamic extension of the language that supports reasoning about the effects of belief change operations. Finally, we provide a succinct formulation of model checking for our languages and a PSPACE model checking algorithm relying on a reduction into TQBF. We present some experimental results for the implemented algorithm on computation time in a concrete example.
A Logic for Reasoning About Aggregate-Combine Graph Neural Networks
Apr 30, 2024
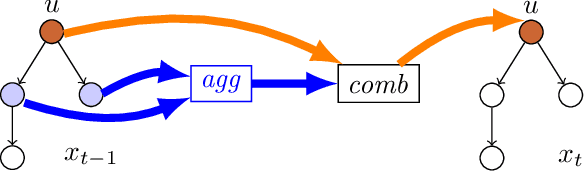

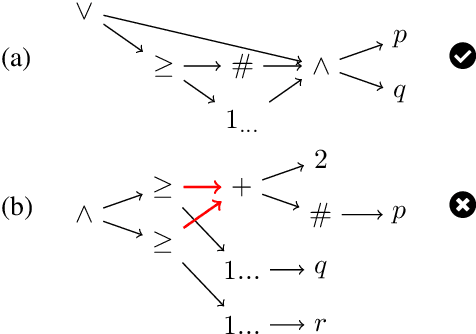
We propose a modal logic in which counting modalities appear in linear inequalities. We show that each formula can be transformed into an equivalent graph neural network (GNN). We also show that a broad class of GNNs can be transformed efficiently into a formula, thus significantly improving upon the literature about the logical expressiveness of GNNs. We also show that the satisfiability problem is PSPACE-complete. These results bring together the promise of using standard logical methods for reasoning about GNNs and their properties, particularly in applications such as GNN querying, equivalence checking, etc. We prove that such natural problems can be solved in polynomial space.
Base-based Model Checking for Multi-Agent Only Believing
Jul 27, 2023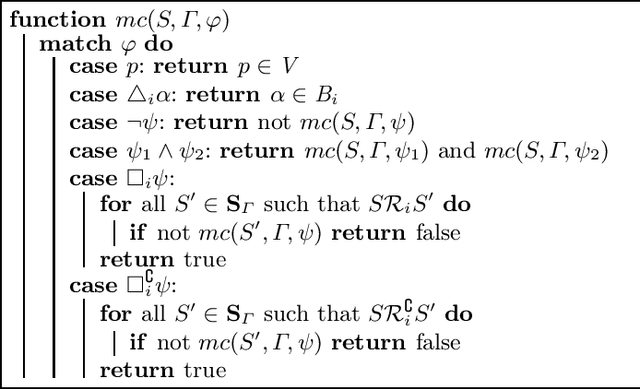
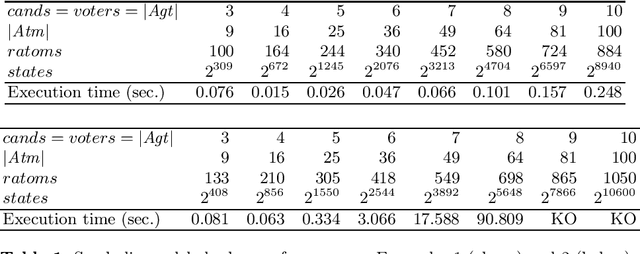
We present a novel semantics for the language of multi-agent only believing exploiting belief bases, and show how to use it for automatically checking formulas of this language and of its dynamic extension with private belief expansion operators. We provide a PSPACE algorithm for model checking relying on a reduction to QBF and alternative dedicated algorithm relying on the exploration of the state space. We present an implementation of the QBF-based algorithm and some experimental results on computation time in a concrete example.
A Modal Logic for Explaining some Graph Neural Networks
Jul 11, 2023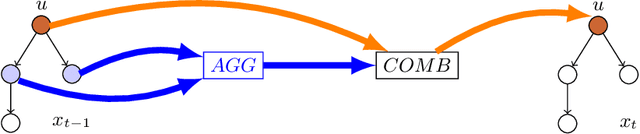



In this paper, we propose a modal logic in which counting modalities appear in linear inequalities. We show that each formula can be transformed into an equivalent graph neural network (GNN). We also show that each GNN can be transformed into a formula. We show that the satisfiability problem is decidable. We also discuss some variants that are in PSPACE.
On simple expectations and observations of intelligent agents: A complexity study
Jun 05, 2023

Public observation logic (POL) reasons about agent expectations and agent observations in various real world situations. The expectations of agents take shape based on certain protocols about the world around and they remove those possible scenarios where their expectations and observations do not match. This in turn influences the epistemic reasoning of these agents. In this work, we study the computational complexity of the satisfaction problems of various fragments of POL. In the process, we also highlight the inevitable link that these fragments have with the well-studied Public announcement logic.
On verifying expectations and observations of intelligent agents
May 12, 2022

Public observation logic (POL) is a variant of dynamic epistemic logic to reason about agent expectations and agent observations. Agents have certain expectations, regarding the situation at hand, that are actuated by the relevant protocols, and they eliminate possible worlds in which their expectations do not match with their observations. In this work, we investigate the computational complexity of the model checking problem for POL and prove its PSPACE-completeness. We also study various syntactic fragments of POL. We exemplify the applicability of POL model checking in verifying different characteristics and features of an interactive system with respect to the distinct expectations and (matching) observations of the system. Finally, we provide a discussion on the implementation of the model checking algorithms.
Conflict-Based Search for Connected Multi-Agent Path Finding
Jun 05, 2020



We study a variant of the multi-agent path finding problem (MAPF) in which agents are required to remain connected to each other and to a designated base. This problem has applications in search and rescue missions where the entire execution must be monitored by a human operator. We re-visit the conflict-based search algorithm known for MAPF, and define a variant where conflicts arise from disconnections rather than collisions. We study optimizations, and give experimental results in which we compare our algorithms with the literature.