 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproved impedance inversion by deep learning and iterated graph Laplacian
Apr 25, 2024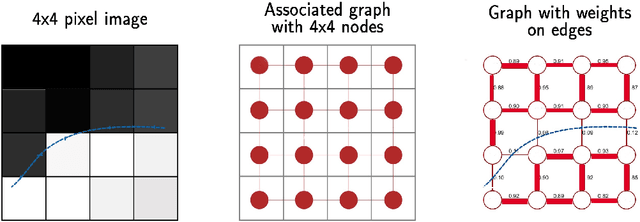
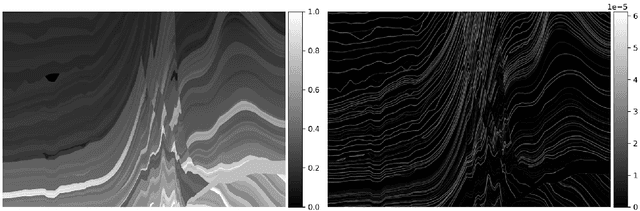
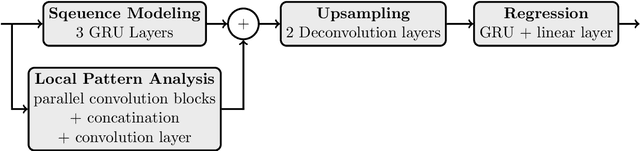
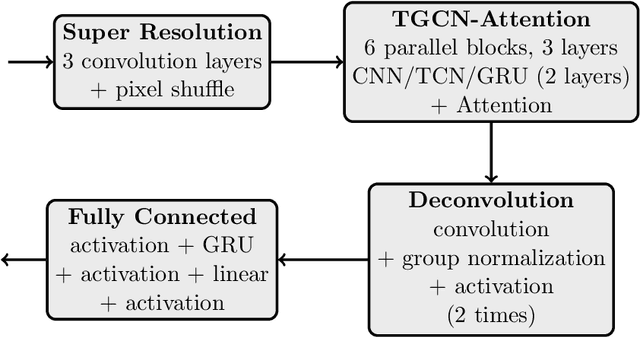
Deep learning techniques have shown significant potential in many applications through recent years. The achieved results often outperform traditional techniques. However, the quality of a neural network highly depends on the used training data. Noisy, insufficient, or biased training data leads to suboptimal results. We present a hybrid method that combines deep learning with iterated graph Laplacian and show its application in acoustic impedance inversion which is a routine procedure in seismic explorations. A neural network is used to obtain a first approximation of the underlying acoustic impedance and construct a graph Laplacian matrix from this approximation. Afterwards, we use a Tikhonov-like variational method to solve the impedance inversion problem where the regularizer is based on the constructed graph Laplacian. The obtained solution can be shown to be more accurate and stable with respect to noise than the initial guess obtained by the neural network. This process can be iterated several times, each time constructing a new graph Laplacian matrix from the most recent reconstruction. The method converges after only a few iterations returning a much more accurate reconstruction. We demonstrate the potential of our method on two different datasets and under various levels of noise. We use two different neural networks that have been introduced in previous works. The experiments show that our approach improves the reconstruction quality in the presence of noise.
A fast and gridless ORKA algorithm for tracking moving and deforming objects
Feb 04, 2024Identifying objects in given data is a task frequently encountered in many applications. Finding vehicles or persons in video data, tracking seismic waves in geophysical exploration data, or predicting a storm front movement from meteorological measurements are only some of the possible applications. In many cases, the object of interest changes its form or position from one measurement to another. For example, vehicles in a video may change its position or angle to the camera in each frame. Seismic waves can change its arrival time, frequency, or intensity depending on the sensor position. Storm fronts can change its form and position over time. This complicates the identification and tracking as the algorithm needs to deal with the changing object over the given measurements. In a previous work, the authors presented a new algorithm to solve this problem - Object reconstruction using K-approximation (ORKA). The algorithm can solve the problem at hand but suffers from two disadvantages. On the one hand, the reconstructed object movement is bound to a grid that depends on the data resolution. On the other hand, the complexity of the algorithm increases exponentially with the resolution. We overcome both disadvantages by introducing an iterative strategy that uses a resampling method to create multiple resolutions of the data. In each iteration the resolution is increased to reconstruct more details of the object of interest. This way, we can even go beyond the original resolution by artificially upsampling the data. We give error bounds and a complexity analysis of the new method. Furthermore, we analyze its performance in several numerical experiments as well as on real data. We also give a brief introduction on the original ORKA algorithm. Knowledge of the previous work is thus not required.